БОЛЬШАЯ СОВЕТСКАЯ ЭНЦИКЛОПЕДИЯ
В ЭНЦИКЛОПЕДИИ СОДЕРЖИТСЯ БОЛЕЕ 100000 ТЕРМИНОВ
В ЭНЦИКЛОПЕДИИ СОДЕРЖИТСЯ БОЛЕЕ 100000 ТЕРМИНОВ
|
БОЛЬШАЯ СОВЕТСКАЯ ЭНЦИКЛОПЕДИЯ
В ЭНЦИКЛОПЕДИИ СОДЕРЖИТСЯ БОЛЕЕ 100000 ТЕРМИНОВ |
АВТОМАТИЧЕСКАЯ ЛУННАЯ СТАНЦИЯ (АЛС), космический аппарат, предназначенный для функционирования на поверхности Луны. Основная задача АЛС - проведение исследований физич. условий на Луне и характеристик лунной поверхности, для чего на борту АЛС размещается науч. аппаратура, а также радиотелеметрич. и телевизионная системы для передачи на Землю данных наблюдений и изображений лунной поверхности. Конструкция и аппаратура АЛС должны быть рассчитаны на работу в специфич. условиях, существующих на Луне. Впервые в мире 3 февр. 1966 посадку на Луну совершила с помощью автоматич. межпланетной станции сов. АЛС "Луна-9", а затем "Луна-13" и АЛС США "Сервейер-1", "Сервейер-3", "Сервейер-5", "Сервейер-6", "Сервейер-7" (см. Космический летательный аппарат, Мягкая посадка). Описание отдельных АЛС см. в статьях "Луна", "Сервеиер". АВТОМАТИЧЕСКАЯ МЕЖПЛАНЕТНАЯ СТАНЦИЯ (АМС), космич. летат. аппарат, предназначенный для полёта к другим небесным телам и для изучения межпланетного космич. пространства, Луны, планет. На борту АМС устанавливается соответствующая научная аппаратура. Результаты измерений передаются с борта АМС на Землю с помощью радиосистем, включая телевизионные системы для передачи изображений поверхности небесных тел. Обычно АМС снабжаются системами астроориентации и ракетным двигателем для коррекции траектории в полёте. Энергопитание бортовой аппаратуры АМС осуществляется от солнечных батарей. До 1 янв. 1969 запущено св. 45 АМС: сов. АМС серий "Луна", "Венера", "Марс" и "Зонд", амер. АМС серий "Маринер", "Рейнджер", "Пионер" и др. Описание отдельных АМС см. в статьях "Луна", "Венера" и др., см. также ст. Космический летательный аппарат. АВТОМАТИЧЕСКАЯ ПОДСТРОЙКА ЧАСТОТЫ, радиотехнич. устройство для автоматич. удержания заданной частоты электрич. колебаний генератора. А. п. ч. применяют в передатчике для поддержания определ. частоты задающего генератора, в супергетеродинном радиоприёмнике для точной настройки на принимаемую станцию, в синтезаторе частот для умножения или деления частоты и др. В распространённой схеме А. л. ч. отклонение частоты от заданной (расстройка частоты) преобразуется дискриминатором в постоянное напряжение соответствующего знака (полярности), пропорциональное амплитуде расстройки (при отсутствии расстройки напряжение на выходе дискриминатора равно нулю). Это выходное напряжение затем подаётся на управитель (реактивного сопротивления лампа, реактивного сопротивления транзистор, варикап и др.), воздействующий на частоту генератора. АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ (АРУ), система, автоматически изменяющая усиление приёмника электрич. колебаний при изменении напряжения сигнала на его входе.
Рис. 1. Обобщённая блок-схема супергетеродинного радиоприёмника с различными типами автоматической регулировки усиления: в 1-м положении переклкг чателя Пр - простая; во 2-м - задержанная; в 3-м - усиленно-задержанная. В радио-вещат. приёмниках АРУ иногда называют устарелым термином автоматич. регулировка громкости (АРГ), в приемниках проводной связи - автоматич. регулировкой уровня. В радиолокационных и др. импульсных приёмниках применяют АРУ, учитывающие особенности работы в импульсном режиме.
Рис. 2. Амплитудные характеристики радиоприёмников с различными типами автоматической регулировки усиления. Пунктиром показан уровень напряжения сигнала на выходе, при к-ром появляются искажения принятых сигналов. В большинстве случаев напряжение сигналов, поступающих на вход приёмника, значительно меняется: из-за различия мощностей передатчиков и расстояний их от места приёма, замираний сигналов при распространении, резкого изменения расстояний и условий приёма между передатчиком и приёмником, установленными на движущихся объектах (самолётах, автомобилях и т. д.), и др. причин. Эти изменения приводят к недопустимым колебаниям или искажениям сигналов в приёмнике. Действие АРУ направлено на значит, уменьшение изменений напряжения выходных сигналов приёмника по сравнению с входными. Это осуществляется посредством цепей, к-рые передают выпрямленное детектором регулирующее напряжение на базы транзисторов или на управляющие сетки электронных ламп переменной крутизны, усилителей высокой, промежуточной частоты и преобразователя частоты, уменьшая их усиление с увеличением напряжения сигнала на входе и наоборот (рис. 1). Таким образом происходит компенсация в приёмнике изменений напряжения входных сигналов. В устройствах радиосвязи распространены три типа АРУ: простая, задержанная и усиленно-задержанная. Наглядно действие АРУ можно отобразить на амплитудной характеристике приёмника (рис. 2). При отсутствии АРУ амплитудная характеристика выражается прямой линией (А - на рис. 2): напряжение сигнала на выходе прямо пропорционально входному. В результате действия простой АРУ (В - на рис. 2) происходит только частичная компенсация изменения напряжения входных сигналов. Недостаток простой АРУ - снижение усиления слабых сигналов - устраняется "задержкой" начала действия АРУ. Задержанная АРУ (Б - на рис. 2) действует так же, как и простая, когда напряжение сигнала на входе превысит нек-рый уровень, определяемый напряжением задержки. Усиленно-задержанную АРУ с усилителем постоянного тока в цепи обратной связи применяют для получения большего постоянства напряжения сигнала на выходе приёмника (Г - на рис. 2). Наибольшее применение в приёмниках нашла задержанная АРУ. Лит.: Сифоров В. И., Радиоприемные устройства, 5 изд., М., 1954; Тартаковский Г. П., Динамика систем автоматической регулировки усиления, М.- Л., 1957. АВТОМАТИЧЕСКАЯ РОТОРНАЯ ЛИНИЯ, комплекс рабочих машин, трансп. устройств, приборов, объединённых единой системой автоматич. управления, в к-ром одновременно с обработкой заготовки перемещаются по дугам окружностей совместно с воздействующими на них орудиями (см. Автоматическая линия). Наиболее распространены А. р. л. для операций, выполняемых посредством прямолинейного рабочего движения (штамповка, вытяжка, прессование, сборка, контроль). Рис. 1. Принципиальная схема автоматической роторной линия: 1 - блок инструмента; 2 - ротор транспортный; 3 - клещи; 4 - линия перемещения изделия при обработке: 5 - ротор рабочий; 6 - копир.
А. р. л. состоит из рабочих роторов и трансп. роторов, передающих заготовки с одного рабочего ротора на другой (рис. 1). Рабочий ротор представляет собой жёсткую систему, на к-рой монтируется группа орудий, равномерно расположенных вокруг общего вращающего систему вала. Необходимые рабочие движения сообщаются этим орудиям исполнит, органами; для малых усилий применяются механич. исполнит. органы (рис. 2), для больших - гидравлические (напр., штоки гидравлич. силовых цилиндров). Инструмент, как правило, монтируется комплектно в предварительно налаживаемых (вне рабочих машин) блоках, сопрягаемых с исполнит, органами ротора преим. только осевой связью, что обеспечивает возможность быстрой замены блоков. Трансп. роторы принимают, транспортируют и передают изделия. Они представляют собой барабаны или диски, оснащённые несущими органами. Чаще применяются простые трансп. роторы, имеющие одинаковую трансп. скорость, общую плоскость транспортирования и одинаковую ориентацию предметов обработки. Для передачи изделий между рабочими роторами с различными шаговыми расстояниями или различным положением предметов обработки предназначены трансп. роторы, к-рые могут изменять угловую скорость и положение в пространстве транспортируемых предметов. Рабочие и трансп. роторы соединяются в линии общим синхронным приводом, перемещающим каждый ротор на один шаг за время, соответствующее темпу линии. На А. р. л. можно выполнять операции, значительно различающиеся по продолжительности, напр. прессовые, контрольные, термич. и химические. А. р. л. может одновременно обрабатывать неск. различных изделий.
Рис. 2. Схематическая развёртка прессовой операции на роторной линии: 1 - предмет обработки; 2,3 - инструмент; 4- пазовый копир; 5 - ползун; 6 - ролики ползунов; h - шаг между предметами обработки; Lп - длина пути предмета обработки; Lц - цикловой путь инструмента; Vтр - транспортная скорость; Vтехн -технологическая скорость. Такие многономенклатурные А. р. л. (рис. 3) могут применяться в немассовых произ-вах. А. р. л. могут работать по т. н. рефлекторным циклограммам, обеспечивающим срабатывание каждого органа в соответствии с командой контроля по одному из нескольких предусмотренных законов (напр., совершить рабочий ход или отказаться от него). Рефлекторные циклограммы позволяют машине реагировать без остановки на различные отклонения от нормального хода работы, напр, на поступление некондиционного предмета, прекращение подачи детали при сборке и т. п. А. р. л. созданы
в СССР в конце 30-х гг., зарубежные А. р. л.- в нач. 50-х гг. В СССР А.
р. л. получили применение в холодноштамповочном произ-ве, в пищ. пром-сти
(расфасовка и упаковка жидких продуктов), в произ-ве штучных изделий из
пластич. масс. Особенно перспективно дальнейшее распространение А. р. л.
для выпуска массовых изделий (радиодеталей, штампованных деталей и др.).
Их применение наиболее рационально в произ-ве с не-продолжит. технологич.
процессами и при изготовлении относительно простых предметов, имеющих форму
тел вращения. Производительность А. р. л. определяется транспортной скоростью
ротора и шаговым расстоянием между изделиями в роторе. Применение А. р.
л. по сравнению с отд. автоматами не роторного типа сокращает производств,
цикл в 10- 15 раз; значительно уменьшаются кежопе-рационные запасы заготовок
(в 20- 25 раз); высвобождаются производственные площади; в неск. раз снижается
трудоёмкость изготовления и себестоимость продукции; капитальные затраты
окупаются за 1-3 года. См. также Автоматическая линия.
Рис. 3. Принципиальная схема многономенклатурной роторной линии: 1 - питающие устройства; 2 - транспортный ротор; 3 - рабочий ротор; 4 - приёмные устройства. Лит.: Кошкин Л. Н., Густов А. А., Роторные машины для механической обработки, К., 1964; Кошкин Л. Н., Комплексная автоматизация на базе роторных линий, М., 1965. Л. Н. Кошкин. АВТОМАТИЧЕСКАЯ СВАРКА, дуговая электросварка, в к-рой основные операции - подача электрода в дугу и перемещение дуги по линии сварки-механизированы. Если механизирована только подача проволоки, а дугу перемещают вручную, сварка наз. полуавтоматической. Чаще всего применяется А. с. плавящимся электродом-проволокой, смотанной в бухту массой 20- 60 кг и непрерывно подаваемой в дугу по мере плавления. Для защиты сварочной ванны от атм. воздуха, а также для раскисления металла и его легирования шов предварительно засыпают толстым слоем флюса (см. Сварка под флюсом), в к-рый погружена дуга. Флюс обеспечивает высокое качество металла шва, устраняет разбрызгивание металла, позволяет повысить сварочный ток и производительность в неск. раз по сравнению со сваркой открытой дугой. Дуга по линия сварки (напр., при круговых швах) перемещается передвижением сварочного автомата или самого изделия. Если автомат конструктивно объединён с механизмом передвижения, его наз. самоходным; если же его передвигают непосредственно по поверхности изделия или по лёгкому переносному пути, уложенному на изделие, то его наз. сварочным трактором (рис.). Широко распространены шланговые полуавтоматы. В них электродная проволока из механизма подачи по гибкому шлангу поступает в держатель, находящийся в руке сварщика. Вместо флюса применяют защитные газы - аргон или углекислый газ, а также газовые смеси (см. Сварка в защитных газах). Однако из-за разбрызгивания металла в этом случае сила тока и производительность ниже, чем при сварке под флюсом. Известна также А. с. неплавящимся вольфрамовым электродом в защитном газе, обычно в аргоне. Наряду с проволокой сплошного сечения при автоматич. и полуавтоматич. сварке пользуются т. н. порошковым электродом, представляющим собой трубку, начинённую порошками железа, легирующих и флюсообразующих компонентов . Сварка барабана котла сварочным трактором: 1 - барабан котла; 2 - сварочный трактор; 3 - ролики вращателя. К. К. Хренов. "АВТОМАТИЧЕСКАЯ СВАРКА", ежемесячный научно-технич. и производств, журнал, орган Ин-та электросварки им. Е. О. Патона АН УССР. Издаётся в Киеве на рус. яз. Осн. в 1948. Тираж (1969) 6500 экз. Освещает результаты исследований сварочных процессов, печатает материалы по теории и практике сварки чёрных и цветных металлов, а также др. материалов, по вопросам проектирования и изготовления сварных конструкций. АВТОМАТИЧЕСКАЯ СИСТЕМА ПОДГОТОВКИ СТАРТА (АСПС), единая автоматич. система, охватывающая весь комплекс автоматич. систем управления отдельными агрегатами и системами стартового комплекса космодрома. Эти системы участвуют в установке космич. летат. аппарата с его ракетой-носителем на стартовом комплексе, в пристыковке к ним наземных коммуникаций, заправке компонентами ракетного топлива, тер-мостатировании и подготовке к пуску. АСПС также управляет операциями по хранению и термостатированию компонентов топлива и их полуавтоматич. сливом из баков ракеты-носителя, а также съёмом ракеты-носителя с пусковой системы. Управление агрегатами и системами АСПС осуществляется с центр. пульта подготовки. АВТОМАТИЧЕСКАЯ ТЕЛЕФОННАЯ СТАНЦИЯ (АТС), см. в ст. Телефонная станция. АВТОМАТИЧЕСКАЯ ЧАСТОТНАЯ РАЗГРУЗКА, автоматич. отключение части потребителей электроэнергии при аварийном снижении частоты в энергосистеме (из-за чрезмерного увеличения электрич. нагрузки в системе или отключения значит, генераторной мощности). Автоматы частотной разгрузки отключают отд. линии или отд. потребителей при снижении частоты в системе (см. Автоматическое регулирование частоты). АВТОМАТИЧЕСКИЙ
АНАЛИЗ текста (АА), операция, к-рая заключается в том, что из данного текста
на естественном языке извлекается содержащаяся в этом тексте грамматич.
и семантич. информация, выполняемая по нек-рому алгоритму в соответствии с заранее
разработанным описанием данного языка. Обратная операция наз. автоматическим
синтезом текста. АА подразделяется на три этапа: 1) лексико-морфологич.-переход
от отд. словоформы к её лексико-грамматич. характеристике; 2) синтаксический
- переход от цепочки лексико-грамматич. характеристик, представляющих фразу,
к её синтаксич. структуре; 3) семантический - переход от синтаксически проанализированной
фразы к её смысловой записи. В алгоритме АА обычно различают сведения о языке
(«грамматика») и сведения о самом процессе анализа («механизм», или собственно
алгоритм АА). АА является необходимым этапом в разных видах автоматич. обработки
текстов: автоматич. перевода, автоматич. реферирования, информационного поиска
и т. п. АА следует отличать от автоматич. исследования текстов, при котором
полностью (или почти полностью) отсутствуют сведения о языке текста и текст
обрабатывается алгоритмом именно с целью построения описания языка.
АВТОМАТИЧЕСКИЙ ДИСПЕТЧЕР ЭНЕРГООБЪЕДИНЕНИЯ, совокупность неск. взаимосвязанных
управляющих машин, установленных на различных уровнях энергообъединения для
координации работ отдельных электростанций и энергосистем. Развитие энергетики
в 60-х гг. 20 в. характеризуется быстрым ростом мощности энергетич. систем и
созданием крупных энергетич. объединений, имеющих сложную конфигурацию сетей,
в состав к-рых входят десятки электрич. станций, обладающих различными экономич.
характеристиками. Орг-ция управления, при к-рой диспетчеры координируют работу
отд. электростанций и энергосистем, не экономична и мешает внедрению новых совершенных
методов оптимизации режимов энергосистем. Правильное решение задачи оптимального
управления даёт большой экономии. эффект: в энергосистемах СССР, напр., за счёт
уменьшения расхода условного топлива только на 1 % может быть сэкономлено более
30 млн. руб. в год. Работы по созданию и внедрению автоматизированных систем
оптимального управления энергообъединениями в СССР (до 60-х гг.) велись в направлении
разработки алгоритмов и программ оптимального планирования и управления режимами.
Их внедрение на универсальных цифровых вычислит, машинах в ряде мощных энергетич.
систем и объединений подтвердило большую экономич.
АВТОМАТИЧЕСКИЙ СИНТЕЗ текста (АС), операция, в к-рой по заданной грамматич.
и семантич. информации строится содержащий эту информацию текст на естественном
языке; операция выполняется по нек-рому алгоритму в соответствии с заранее разработанным
описанием данного языка. Обратная операция наз. автоматическим анализом текста.
АС подразделяется на три этапа: 1) семантический - переход от смысловой записи
фразы к её синтаксич. структуре; 2) синтаксический - переход от синтаксич. структуры
фразы к представляющей фразу цепочке лексико-грамма-тич. характеристик словоформ;
3) лекси-ко-морфологический - переход от лск-сико-грамматич. характеристики
к реальной словоформе. АС - необходимый этап в разных видах автоматич. обработки
текстов, в частности при машинном переводе. АС следует отличать от автоматич.
порождения текстов, при к-ром строятся произвольные правильные тексты безотносительно
к какому бы то ни было предварительному смысловому заданию.
АВТОМАТИЧЕСКОЕ ОРУЖИЕ, огнестрельное оружие, в к-ром энергия пороховых
газов при выстреле используется не только для сообщения пуле (снаряду) движения,
но и для перезаряжания оружия и производства очередного выстрела. А. о. позволяет
вести как непрерывный, так и одиночный огонь. Оружие, в к-ром автоматизировано
только перезаряжание, наз. полуавтоматическим, или самозарядным (в отличие от
автоматического - самострельного). Гл. особенность А. о.- его высокая скорострельность,
к-рая позволяет поражать быстро движущиеся цели и создавать большую плотность
огня.
В СССР оружейная техника получила большое развитие. Выдвинулось много талантливых оружейников-конструкторов А. о., к-рое применялось в Великой Отечеств, войне 1941-45: В. А. Дегтярёв, Ф. В. Токарев, Г. С. Шпагин, С. Г. Симонов, Б. Г. Шпитальный, П. М. Горюнов, А. И. Судаев и др. Творцами совр. А. о. являются М. Г. Калашников, Е. Ф. Драгунов, Н. Ф. Макаров и др. Большое значение для развития сов. А. о. имела теория проектирования А. о., созданная А. А. Благонравовым и развитая в трудах Е. Л. Бравина, В. С. Пугачёва, М. А. Мамонтова, Э. А. Горова. В капиталистич. армиях, участвовавших во 2-й мировой войне, А. о. было особенно широко распространено в герм, армии. В совр. армиях развитых гос-в используется только автоматич. и самозарядное оружие. А. о. в зависимости от боевого назначения делится на след, виды: автоматич. пистолеты, автоматы (пистолеты-пулемёты), автоматич. винтовки (карабины), самозарядные винтовки, ручные пулемёты, станковые пулемёты, крупнокалиберные пулемёты, автоматические пушки. Устройство автоматики в значит, степени зависит от способа использования энергии пороховых газов. Совр. А. о. можно разделить на след, типы: а) Системы оружия, в к-рых действие автоматики основано на использовании отдачи ствола. Эти системы имеют подвижный ствол, с к-рым во время выстрела прочно сцеплен затвор. Отход затвора и ствола под действием отдачи и возвращение под воздействием возвратных пружин обеспечивают автоматич. извлечение стреляной гильзы, досыл очередного патрона в патронник и запирание затвора. В этих системах различают системы с длинным (рис. 1; напр., у франц. ручного пулемёта Шоша) и коротким (рис. 2; напр., у пистолета ТТ и станкового пулемёта Максима) ходом ствола. б) Системы оружия, в к-рых действие автоматики основано на использовании отдачи затвора. В этих системах ствол закрепляется неподвижно, а затвор во время выстрела либо совершенно не сцеплен со стволом (свободный затвор - рис. 3; напр., у пистолета-пулемёта Дегтярёва образца 1940 и пистолета-пулемёта Шпагина образца
1941), либо сцеплен так, что расцепление (отпирание) происходит под действием
давления пороховых газов на дно гильзы (полусвободный затвор - рис. 4;
напр., у англ, пистолета-пулемёта Томпсона образца 1928).
в) Системы оружия, в к-рых действие автоматики основано на использовании отвода пороховых газов в спец. газовую камору, расположенную обычно в передней части ствола, куда через газоотводное отверстие в стволе поступают пороховые газы после того, как пуля минует это отверстие. В газовой каморе помещается подвижный поршень, с к-рым соединён шток затворной рамы (рис. 5; напр., у ручного пулемёта Дегтярёва образца 1927 и автомата Калашникова) или стебля затвора (рис. 6; напр., у крупнокалиберного пулемёта Шпитального и Владимирова). Под давлением пороховых газов шток вместе с затвором или стеблем затвора перемещается назад, производя отпирание затвора и извлечение гильзы. Обратное движение подвижных частей и заряжание производятся действием возвратной пружины. Положительные качества автоматики этого типа определили её широкое применение в совр. образцах автоматич. оружия. Высокий режим огня А. о. вызывает весьма быстрое нагревание ствола, в связи с чем важную роль играет система его охлаждения. В первых образцах станковых пулемётов широко применялось водяное охлаждение, что нередко затрудняло их боевое применение при отсутствии воды, а также приводило к увеличению массы и габаритов. Совр. пулемёты и др. виды А. о. в основном имеют возд. охлаждение стволов. В единых пулемётах, используемых в качестве станковых и ручных, обеспечивается смена нагревшихся стволов в боевых условиях. Лит.: Материальная часть стрелкового оружия, кн. 1 - 2, М., 1945 - 46; Благонравов А. А., Основания проектирования автоматического оружия, М., 1940; Горов Э. А., Гнатовский Н. И., Основания устройства автоматического оружия, Пенза, 1960. П. И. Сироткин. АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ), быстрое автоматич. обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматич. отключения; одно из наиболее эффективных средств противоава-рийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрич. системы. Во многих случаях после быстрого отключения участка электрич. системы, на к-ром возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. А. п. в. выполняется с помощью автоматич. устройств, воздействующих на высоковольтные выключатели после их аварийного автоматич. отключения от релейной защиты. Многие из этих автоматич. устройств обеспечивают А. п. в. при самопроизвольном отключении выключателей, напр, при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность А. п. в. тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла А. п. в. В электрич. системах применяют однократное А. п. в.- с одним циклом, двухкратное - при неуспешном первом цикле, и трёхкратное - с тремя последовательными циклами. Цикл А. п. в.- время от момента подачи сигнала на отключение до замыкания цепи гл. контактами выключателя - состоит из времени отключения и включения выключателя и времени срабатывания устройства А. п. в. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его гл. контактов восстановил способность к отключению повреждённой цепи в случае неуспешного А. п. в. Время деионизации зависит от среды, климатич. условий и др. факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов А. п. в., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5-1,5 сек, 2-го- от 10 до 15 сек, 3 го - от 60 до 120 сек. Наиболее распространено однократное А. п. в., обеспечивающее на возд. линиях высокого напряжения (110 кв и выше) до 86% , а на кабельных линиях (3-10 кв) - до 55% успешных включении. Двухкратное А. п. в. обеспечивает во втором цикле до 15% успешных включений. Третий цикл увеличивает число успешных включений всего на 3-5%. На линиях электропередачи высокого напряжения (от 110 до 500 кв) применяется однофазо-вое А.п. в.; при этом выключатели должны иметь отд. приводы на каждой фазе. Применение А. п. в. экономически выгодно, т. к. стоимость устройств А. п. в. и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии. Лит.: Соловьев И. И., Автоматизация энергетических систем, 2 изд., М.- Л., 1956; Барзам А. Б., Системная автоматика, 2 изд., М.- Л., 1964. М. И. Царев. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ВОЗБУЖДЕНИЯ (АРВ), процесс изменения по заданным условиям тока возбуждения электрич. машин. Осуществляется на синхронных генераторах, мощных синхронных двигателях, синхронных компенсаторах, на генераторах и двигателях постоянного тока и на др. спец. электрич. машинах изменением напряжения на обмотке возбуждения. При этом изменяется сила тока возбуждения электрич. машины и, как следствие, основной магнитный поток и эдс в обмотках якоря. АРВ синхронных генераторов осуществляется в основном с целью обеспечения заданного напряжения в электрич. сети, а также для повышения устойчивости их параллельной работы на общую сеть.АРВ широко применяется в электроприводе пост, тока для поддержания постоянства частоты вращения рабочего органа машины путём воздействия на ток возбуждения двигателя или питающего генератора. Различают АРВ пропорционального и сильного действия. АРВ пропорционального действия характеризуется изменением силы тока возбуждения пропорционально отклонению напряжения на зажимах машины от заданного значения (отрицат. обратная связь по напряжению). Регуляторы возбуждения пропорционального действия могут содержать устройства компаундирования (положительная обратная связь по току машины) и стабилизации (гибкая отрицательная обратная связь по напряжению возбуждения). АРВ пропорционального действия не обеспечивает достаточной точности поддержания напряжения электрич. станций, работающих на дальние линии электропередачи и в случаях, когда в системе имеются резкопеременные нагрузки, приводящие к значит, колебаниям напряжения. Тогда применяют АРВ сильного действия, при к-ром увеличение эффективности достигается введением регулирования возбуждения по отклонению напряжения, по производным от тока, напряжения, частоты и др., выбираемых в определ. соотношениях; характеризуется высоким быстродействием и большой мощностью системы возбуждения. Привритет создания АРВ сильного действия принадлежит сов. энергетикам; это способствовало решению одной из важных проблем электроэнергетики - передачи больших мощностей по линиям переменного тока на дальние расстояния. Впервые АРВ сильного действия было осуществлено на Волжской ГЭС им. В. И. Ленина (1955-57). Лит.: Иносов В. Л., Цукерник Л. В., Компаундирование и электромагнитный корректор напряжения синхронных генераторов, М.- Л., 1954; Веников В. А., Электромеханические переходные процессы в электрических системах, М.- Л., 1958; Сильное регулирование возбуждения, М.- Л., 1963; Андре ев В. П., Сабинин Ю. А., Основы электропривода, 2 изд., М.- Л., 1963. В. П. Васин, В. А. Строев. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ (АРН), процесс поддержания напряжений в узловых точках электрич. системы в заданных пределах, осуществляемый для обеспечения технически допустимых условий работы потребителей электрич. энергии и собств. системы, а также для повышения экономичности их работы (см. Энергосистема). У большинства потребителей электроэнергии допускаются длительные отклонения напряжения от номинального не более чем на ±5%. Превышение номинального напряжения приводит к сокращению срока службы потребителей электроэнергии, уменьшение - снижает производительность и экономичность работы потребителей, пропускную способность линий электропередачи, может нарушить устойчивость работы синхронных машин и асинхронных двигателей. Необходимость АРН вызывается переменными режимами работы потребителей и источников электроэнергии. Так, с увеличением нагрузок возрастает сила тока в сети, а следовательно, и потери напряжения в различных её участках, вследствие чего напряжения у потребителей могут выходить за допустимые пределы. В связи с этим на шинах электростанций и на шинах вторичного напряжения районных подстанций осуществляется, как правило, встречное (согласное) регулирование, при к-ром с увеличением нагрузок напряжение держится выше номинального, а при снижении нагрузок - понижается. Это уменьшает размах отклонений напряжений у потребителей. Однако в общем случае такое регулирование не исключает необходимости АРН у каждого потребителя. АРН на электростанциях осуществляется регулированием возбуждения синхронных генераторов (см. Автоматическое регулирование возбуждения). На подстанциях АРН осуществляется регулированием возбуждения синхронных компенсаторов, если они установлены на этих подстанциях.или автоматич. изменением под нагрузкой коэфф. трансформации трансформаторов, а также регулированием мощности батарей статич. конденсаторов. У потребителей электроэнергии АРН осуществляется регулированием возбуждения мощных синхронных двигателей и регулированием мощности батарей статич. конденсаторов. Вопрос о конкретном выборе регулирующих устройств решается на основе технико-экономич. анализа. Лит.: Глазунов А. А. и Глазунов А. А., Электрические сети и системы, 4 изд., М.- Л., 1960; Барзам А. Б., Системная автоматика, 2 изд.,М.-Л., 1964; Мельников Н. А., Солдаткина Л. А., Регулирование напряжения в электрических сетях, М., 1968. В. П. Васин, В. А. Строев. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ (АРЧ), процесс поддержания частоты переменного тока в энергосистеме в пределах, допустимых технич. требованиями и условиями экономичности её работы (см. Энергосистема). Нормальное функционирование значит, части потребителей электроэнергии зависит от частоты питающего тока. У нек-рых производственных агрегатов, напр, бумагоделательных, текст, машин, существенные отклонения частоты приводят к браку продукции, а иногда и к аварии. При снижении частоты сильно уменьшается производительность питающих насосов тепловых электростанций, что грозит нарушением работы энергосистемы. В СССР номинальное значение частоты переменного тока в энергосистемах равно 50 гц; допускается длительное отклонение не более 0,1 гц, т. е. 0,2%. Частота переменного тока энергосистемы определяется частотой вращения параллельно работающих синхронных генераторов. При изменении потребляемой мощности происходит ускорение или торможение генераторов,, и частота в системе меняется. Для обеспечения нужного уровня частоты необходимо изменять мощность турбин. Это осуществляется регуляторами скорости, к-рые регулируют впуск энергоносителя (вода, пар, газ) в турбину. АРЧ, осуществляемое регуляторами скорости, наз. первичным регулированием. За исключением особых случаев, первичное регулирование недостаточно для поддержания в энергосистеме нормального уровня частоты. Поэтому осуществляется дополнительное, вторичное регулирование частоты. Для этого устанавливаются спец. устройства, к-рые, воздействуя на регулятор скорости, вызывают добавочное изменение впуска энергоносителя в турбину. При осуществлении вторичного регулирования частоты на неск. агрегатах или станциях системы возникает необходимость обеспечения устойчивого распределения нагрузки между ними. Эта задача связана с регулированием активной мощности и оптимальным распределением нагрузок между агрегатами. Лит.: Соловьев И. И., Автоматизация энергетических систем, 2 изд., М.- Л., 1956; Москалев А. Г., Автоматическое регулирование режима электрической системы по частоте и активной мощности, М.-Л., 1960.В. П. Васин, В.А. Строев. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технич. и биотехнич. системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относит, недоступности или опасных для здоровья (см. Автоматизация производства, Автоматизация управленческих работ. Большая система). Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины - выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта - управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, останов, контроль, наладка и т. д.) также могут быть автоматизированы. САУ функционирует в основном в составе производств, или к.-л. другого комплекса. История техники насчитывает много ранних примеров конструкций, обладающих всеми отличит, чертами САУ (регулирование потока зерна на мельнице с т. н. "потряском", уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое технич. применение, была система автоматич. регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механич. регулирующие системы и устройства, достигшие значит, развития в кон. 19 - нач. 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматич. контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производств, процессами и пром. комплексами на базе электронных управляющих вычислит, машин. САУ классифицируются в основном по цели управления, типу контура управления и способу передачи сигналов. Первоначально перед САУ ставились задачи поддержания определённых законов изменения во времени управляемых величин. В этом классе систем различают системы автоматич. регулирования (САР), в задачу к-рых входит сохранение постоянными значения управляемой величины; системы программного управления, где управляемая величина изменяется по заданной программе; следящие системы, для к-рых программа управления заранее неизвестна. В дальнейшем цель управления стала связываться непосредственно с определёнными комплексными показателями качества, характеризующими систему (её производительность, точность воспроизведения и т. п.); к показателю качества могут предъявляться требования достижения им предельных (наибольших или наименьших) значений, для чего были разработаны адаптивные, или самоприспосабливающиеся системы. Последние различаются по способу управления: в самонастраивающихся системах меняются параметры устройства управления, пока не будут достигнуты оптимальные или близкие к оптимальным значения управляемых величин; в самоорганизующихся системах с той же целью может меняться и её структура. Наиболее широки, в принципе, возможности самообучающихся систем, улучшающих алгоритмы своего функционирования на основе анализа опыта управления. Отыскание оптимального режима в адаптивных САУ может осуществляться как с помощью автоматического поиска, так и беспоисковым образом. Способ компенсации возмущений связан с типом контура управления системы. В разомкнутых САУ на УУ не поступают сигналы, несущие информацию о текущем состоянии управляемого объекта, либо в них измеряются и компенсируются главные из возмущений, либо управление ведётся по жёсткой программе, без анализа каких-либо факторов в процессе работы. Осн. тип САУ - замкнутые, в к-рых осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и УУ; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь, вне зависимости от причин, вызвавших эти отклонения. Объединение принципов управления по отклонению и по возмущению приводит к комбинированным системам. Часто, помимо осн. контура управления, замыкаемого главной обратной связью, в САУ имеются вспомогат. контуры (многоконтурные системы) для стабилизации и коррекции динамич. свойств. Одновременное управление неск. величинами, влияющими друг на друга, осуществляется в системах многосвязного управления или регулирования. По форме представления
сигналов различают дискретные и непрерывные САУ. В первых сигналы, по крайней
мере в одной точке цепи прохождения, квантуются по времени (см. Импульсная
система), либо по уровню (см. Релейная система), либо как по уровню, так
и по времени (см. Квантование сигнала).
Простейший пример САУ - система прямого регулирования частоты вращения двигателя (рис. 1). Цель управления - поддержание постоянной частоты вращения маховика, управляемый объект - двигатель 1; управляющее воздействие - положение регулирующей заслонки дросселя 3; УУ - центробежный регулятор 2, муфта 4 к-рого смещается под действием центробежных сил при отклонении от заданного значения частоты вращения вала 5, жёстко связанного с маховиком. При смещении муфты изменяется положение заслонки дросселя. Структурная схема рассмотренного примера (рис. 2) типична для многих САУ вне зависимости от их физич. природы. Описанная система представляет собой замкнутую одноконтурную непрерывную систему автоматич. регулирования механич. действия, допускающую линеаризацию при исследовании. Пром-сть выпускает универсальные регуляторы, в т. ч. с воздействием по производной, по интегралу (см. Коррекция динамических свойств), экстремальные регуляторы, для управления различными объектами. Специализированные САУ широко применяются в различных областях техники, напр.: следящая система управления копировально-фрезерным станком по жёсткому копиру; САУ металлорежущих станков с программным управлением от магнитной ленты, перфоленты или перфокарты (преимущества такого управления заключаются в относит, универсальности, лёгкости перестройки программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислит. машину. В относительно медленных технологич. процессах в хим. и нефт. пром-сти распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о темп-ре, давлении, расходе и составе нефтепродуктов, получаемая от неск. сотен датчиков, используется для формирования сигналов управления десятками различных регуляторов. САУ играют важную роль в авиации и космонавтике, напр, автопилот представляет собой САУ связанного регулирования, а иногда и самонастраивающуюся систему. В военной технике применяются высокоточные следящие системы, часто включающие вычислит, устройства (напр., система углового сопровождения радиоло-кац. станции). При анализе многих физио-логич. процессов в живом организме, таких как кровообращение, регуляция темп-ры тела у теплокровных животных, двигательные операции, обнаруживаются характерные черты САУ (см. Кибернетика биологическая).
Задачи синтеза устройств А. у. и анализа процессов в управляемых системах являются предметом теории автоматич. управления. Р.С. Рутман Теория автоматического управления (ТАУ) изучает принципы построения систем автоматич. управления и закономерности протекающих в них процессов, к-рые она исследует на динамич. моделях действит. систем с учётом условий работы, конкретного назначения и конструктивных особенностей управляемого объекта и автоматич. устройств, с целью построения работоспособных и точных систем управления. Первоначально ТАУ развивалась как теория автоматич. регулирования (ТАР) и была одним из разделов теоретич. и технич. механики. На этой стадии ТАУ изучала процессы управления паровыми котлами и электрич. машинами, но раздельно в пределах только теплотехники и только электротехники. Быстрое развитие всех отраслей техники и пром-сти сопровождалось совершенствованием методов и средств техники управления; обнаружилась аналогичность процессов управления в технич. устройствах, независимо от их природы и назначения. С развитием управления в технике шло также изучение проблем управления в организмах и в экономич. системах. Вплоть до сер. 20 в. исследования процессов управления в этих разнородных объектах не были связаны. В технике управляющие устройства, внешние по отношению к объектам, создаются отдельно и лишь затем соединяются с объектами в единую систему управления. На основе изучения взаимодействия этих устройств с объектами была выявлена общность процессов управления. Именно поэтому ТАР зародилась в технике и превратилась в самостоят, технич. науку. В живых организмах и в экономике органы управления составляют неотъемлемую часть этих объектов. Здесь нет необходимости конструирования отдельно действующих органов управления, а изучение всего механизма управления велось разрозненно в соответствующих областях знаний без участия специалистов по управлению. Однако процессы управления, обладающие определённой спецификой в биологии и экономике, потребовали обязательной коллективной работы специалистов различных областей науки и техники, тем более при совр. уровне развития науки, когда выявилась также и необходимость взаимного обмена знаниями. Н. Винеру принадлежала мысль об общности процессов управления в технике, живых организмах и в экономике и необходимости совместной деятельности учёных различных специальностей (см. Кибернетика). Этот вывод подготовлялся длит, время и многими др. исследователями. Было обнаружено, что технич. наука - ТАР, способна объяснить процессы управления и влиять на них не только в технике; сфера её применения расширилась, но при этом усложнились цели и методы теории, к-рая получила новое название "Теория автоматического управления". Для ТАР характерна задача стабилизации заданного состояния объекта. В ТАУ эта задача входит составной частью в проблему приспособления, или адаптации, к-рая присуща живым организмам и экономич. орг-циям. Но и для техники эти проблемы весьма актуальны, если учесть переменность параметров объектов управления, работу их при меняющихся условиях, а также оценку эффективности этой работы в чисто экономич. терминах, напр. прибыльность или уменьшение затрат труда и материалов. Так возникла проблема синтеза и анализа систем автома-тич. управления - осн. проблема ТАУ. Решение её требует изучения динамич. свойств САУ, для чего необходимо мате-матич. описание поведения всех элементов системы в переходных процессах. В общем случае процессы в объектах описываются системами обыкновенных дифференц. ур-ний или ур-ний в частных производных в зависимости от того, имеют ли объекты сосредоточенные или распределённые параметры. Элементы автоматич. устройств также описываются системами дифференц. ур-ний. Специфичен для ТАУ последующий переход от линейных ур-ний к передаточным функциям - операторным выражениям дифференц. и разностных ур-ний. Передаточные функции позволяют легко представить математич. модель системы в виде структурной схемы, состоящей из типовых динамич. звеньев. ТАУ вводит понятия динамич. характеристик - передаточных функций, частотных и временных характеристик, упрощающих составление математических моделей системы и последующие анализ и синтез систем. Динамич. анализ САУ выясняет их работоспособность и точность. Необходимым условием работоспособности САУ служит их устойчивость (см. Устойчивость системы автоматического управления). Для её исследования разработаны критерии устойчивости, позволяющие определять условия устойчивости и необходимые запасы её по косвенным признакам, минуя весьма трудную операцию интегрирования уравнений движения системы. Устойчивость достигается изменением параметров системы и её структуры. В нелинейных САУ исследуется возможный для этих систем режим автоколебаний. Если же по самому принципу действия САУ, напр, для релейных систем, эти колебания неизбежны, то устанавливаются допустимые параметры -амплитуда и частота автоколебаний. Точность САУ оценивается показателями, к-рые в совокупности наз. качеством управления (см. Точность систем автоматического управления). Важнейшие показатели качества САУ: статич. и динамич. погрешности и время регулирования (см. Погрешностью системе автоматического регулирована я). Эти показатели определяются сравнением действит. переходного процесса изменения управляемых величин с требуемым законом их изменения; обычно они указываются для одного из типовых законов изменения управляемой величины. В ТАУ, так же как и при анализе устойчивости, пользуются косвенными методами анализа качества, не требующими решения исходных ур-ний. Для этого вводятся критерии качества - косвенные оценки показателей качества (см. Качества показатели системы автоматического управления). При действии на САУ случайных возмущений наиболее распространён критерий качества динамич. точности - средняя квадратичная ошибка. Эта величина относительно просто может быть связана со ста-тистич. характеристиками возмущающих воздействий и параметрами передаточной функции системы. САУ, в к-рой достигнут экстремум к.-л. показателя качества, именуется оптимальной системой. Нелинейные системы обладают более широкими возможностями достижения оптимума определённого показателя качества, чем системы линейные. Это обусловило применение нелинейных связей для повышения качества систем управления. Анализ системы управления устанавливает свойства системы с уже заданной структурой. Построение алгоритма управления и разработка соответствующей ему структуры системы, выполняющей заданную цель при требуемом качестве управления, установление значений параметров этой системы составляет содержание проблемы синтеза. До начала разработки системы управления сообщаются необходимые для этого исходные данные: свойства управляемого объекта, характер действующих на него возмущений, цель управления и требуемая точность управления. К объекту управления относится его управляющий орган, через к-рый передаётся воздействие на объект от управляющего устройства. Известные характеристики управляющего органа сразу же определяют характеристики исполнит, механизма управляющего устройства. Но на этом обрывается цепь частей системы управления, свойства к-рых определяются однозначно их взаимным влиянием друг на друга. Так вводится понятие неизменяемой части системы управления - неизменяемой в том смысле, что свойства её заданы до начала конструирования алгоритма управления и, как правило, не могут быть изменены. Заданная цель управления определяет и способ управления. В результате выясняется в общих чертах блочная схема системы управления. В основном пользуются 2 методами решения проблемы синтеза - аналитическим и последовательных приближений. При первом либо находится вид передаточной функции автоматич. устройства или алгоритм управления, либо при выбранной структуре указанного устройства устанавливаются значения его параметров, дающие экстремум критерию качества. Этот метод позволяет сразу найти оптимальное решение, но он часто приводит к сложным и громоздким вычислениям. Во втором методе по заданному критерию качества определяется передаточная функция автоматич. устройства и затем для полученной системы сравниваются заданные показатели качества с их действит. значениями. Если приближение оказывается допустимым, расчёт считается законченным и можно приступить к конструированию устройства. Если же приближение оказывается недостаточным, то изменяется вид передаточной функции до получения варианта, удовлетворяющего заданным требованиям точности. При построении сложных систем управления, кроме теоретич. методов, применяется моделирование с применением аналоговых и цифровых вычислит, машин, на к-рых воспроизводятся ур-ния, описывающие всю систему управления в целом, и по результатам расчётов, заканчивающихся при достижении требуемых показателей качества, устанавливается структура устройства управления. Такой метод синтеза близок по идее к методу последо-ват. приближений. Моделирование позволяет оценить влияние таких факторов, как нелинейность ограничения координат, переменность параметров, к-рые ставят почти непреодолимые преграды для ана-литич. исследования. Применение вычислит, машин освобождает от трудностей расчёта. Они также используются в составе САУ для выполнения сложных алгоритмов управления, к-рые особенно характерны для адаптивных и оптимальных систем и систем с прогнозированием конечного результата управления. Решение проблемы синтеза САУ способствовало появлению новых эффективных принципов управления и развитию важных самостоят, направлений в ТАУ: оптимальное управление, статистич. динамика и чувствительность систем управления. Теория оптимального управления позволила установить структуры систем управления, обладающих предельно высокими показателями качества при учёте реальных ограничений, накладываемых на переменные. Показатели оптимальности могут быть весьма разнообразными. Выбор их зависит от конкретно поставленной задачи. Такими показателями служат показатели динамич. свойств всей системы в целом, критерии экономичности режимов управляемых объектов и др. Распространены оптимальные по быстродействию системы, к-рые переводят объект из одного состояния в другое за минимальный промежуток времени. Статистич. динамика систем управления изучает действие на эти системы случайных возмущений. Методы этой теории позволяют синтезировать системы управления, обеспечивающие минимум динамич. погрешности, решать задачи построения сглаживающих и прогнозирующих следящих систем, определять динамич. свойства управляемых объектов по данным опыта при их нормальном функционировании без внесения пробных возмущений. Статистич. методы исследования широко распространены для изучения различных типов систем управления. Большое значение эти методы приобретают для приспосабливающихся систем. Теория чувствительности систем управления изучает зависимость динамич. свойств этих систем от их меняющихся параметров и характеристик. Показатель чувствительности служит мерой зависимости указанных свойств от вариаций параметров. Теория чувствительности позволяет в ряде случаев указать пути осуществления беспоисковых самонастраивающихся систем. Последний вопрос тесно связан ещё с одним направлением в ТАУ, получившим интенсивное развитие в последние годы - общей теорией адаптации, развитой на базе статистич. методов и методов линейного программирования в математике. Для ТАУ характерна тесная, непрерывно усиливающаяся и взаимно влияющая связь не только с математикой, но также и с физикой и технич. науками, изучающими свойства объектов, к-рые позволяют создать детальные динамич. модели объектов, необходимые при решении усложнившихся задач автоматического управления. Лит.: Максвелл Д. К., Вышне-градский И. А., Стодола А., Теория автоматического регулирования, М., 1949; Лернер А. Я., Введение в теорию автоматического регулирования, М., 1958; Фельдбаум А. А., Вычислительные устройства в автоматических системах, М., 1959; его же, Основы теории оптимальных автоматических систем, М., 1963; Лернер А. Я., Начала кибернетики, М., 1967; Теория автоматического регулирования, под ред. В. В. Солодовникова, кн. 1, М., 1967. АВТОМАТНАЯ ЛАТУНЬ, свинцовистая латунь, латунь, легированная свинцом; содержит 57-75% меди, 0,8-3,9% свинца, остальное - цинк. Добавка свинца способствует образованию при механич. обработке короткой и сыпучей стружки, уменьшает износ режущего инструмента и позволяет вести скоростную обработку деталей на автоматич. станках (отсюда и название). Выпускается в виде прутков, лент, полос и листов, из к-рых изготовляют болты, гайки, детали часов и др. изделия массового произ-ва. Механич. свойства А. л. зависят от состава и соствяния (мягкое или нагартован-ное): предел прочности 300-600 Мн/м2 (30-6в кгс/мм2), относит, удлинение 2-50%. Лит.: Смирягин
А. П., Промышленные цветные металлы и сплавы, 2 изд., М., 1956. Е.С.Шпичинецкий. АВТОМАТНАЯ
СТАЛЬ, сталь с повышенным содержанием серы и фосфора, предназначенная
для изготовления деталей на металлорежущих скоростных станках-автоматах
и полуавтоматах. А. с. производится в виде прутков и содержит в %: 0,08-0,45
углерода, 0,15-0,35 кремния, 0,6-1,55 марганца, 0,08-0,30 серы, 0,05-0,16
фосфора. Повышенное содержание серы приводит к образованию включений (сульфида
марганца и др.), расположенных вдоль волокон, что облегчает резание
и способствует дроблению и лёгкому отделению стружки. Для этих же целей
А. с. иногда легируют свинцом и теллуром. Механич. свойства А. с. вдоль
волокон (в зависимости от марки стали и диаметра прутка) характеризуются
след, показателями: горячекатаные прутки - предел прочности Лит.: Справочник по машиностроительным материалам, т. 1, М., 1959; Ассонов А. Д., Технология термической обработки деталей автомобиля, М., 1958. Я.М. Поток. АВТОМАТОВ ТЕОРИЯ, часть теоретич. кибернетики, объектом исследования к-рой являются различные преобразователи дискретной информации; возникла в нач. 50-х гг. 20 в. в связи с требованиями практики проектирования вычислит, машин и с разработкой математич. моделей процессов переработки информации в биол., экономич. и др. системах. А.т.- самостоятельный раздел математики, имеющий разнообразную проблематику и приложения. Осн. понятиями А. т. являются понятия абстрактного автомата и понятие композиции автоматов. Эти понятия являются разумными абстракциями реально существующих дискретных устройств - автоматов. Понятие абстрактного автомата позволяет характеризовать устройство с точки зрения алгоритма его функционирования, т. е. алгоритма переработки информации, к-рый оно реализует. Понятие композиции автоматов позволяет характеризовать устройство с точки зрения его структуры, иными словами, даёт представление, каким образом данное устройство построено из других, более элементарных. А. т. состоит из ряда разделов. Один из разделов: абстрактно-алгебраическая А. т. В этом разделе абстрактные автоматы изучаются с точки зрения исследования их свойств и различных способов задания. Абстрактным автоматом наз. объект А =А (Я, X,Y,S,X), состоящий из трёх непустых множеств: Я - состояний, X - входных сигналов, Y - выходных сигналов, и двух функций, осуществляющих однозначное отображение множества Я X X в Я, 6 (а, х) переходов и множества ЯХХвУ, X. (а, х) выходов. Абстрактный автомат наз. конечным, если множества 51, X, Y-конечны. В абстракт-но-алгебр. А. т. можно выделить теорию конечных автоматов и теорию бесконечных автоматов. Осн. вопросы теории конечных автоматов можно считать решёнными. Наиболее интересными результатами теории конечных автоматов являются: теорема анализа и синтеза конечных автоматов, к-рая даёт характеристику событий, представленных в конечных автоматах, теоремы об определяющих соотношениях в алгебре регулярных событий, оценки длины экспериментов с конечными автоматами, а также ряд результатов по исследованию алгебр, свойств абстрактных автоматов. В теории бесконечных автоматов рассматриваются различные концепции бесконечных автоматов, точнее выделяются классы бесконечных автоматов специального вида. Этот раздел важен тесной связью с общей теорией формальных языков и грамматик (см. Математическая лингвистика), а также с теорией алгоритмов (см. Алгоритмов теория). В рамках абстрактно-алгебр. А. т. наметился (конец 60-х гг.) подход к решению проблемы создания алгебры алгоритмов и построения аппарата для формальных преобразований выражений в этой алгебре, что позволяет совершенно по-новому подойти к решению такого рода задач, как эквивалентность схем алгоритмов, и даёт возможность эффективно решать оптимизационные задачи в проектировании дискретных устройств. Другим разделом А. т. является структурная А. т. Здесь автомат представляется в виде сети, элементы к-рой выбираются из нек-рой заданной совокупности элементарных автоматов, соединены между собой нек-рым специальным образом и осуществляют запоминание и преобразование элементарных сигналов. Осн. результатами структурной А. т. являются: практич. методика построения сложных логич. сетей, исследования по асимптотич. оценкам сложности их, решению проблемы полноты системы элементарных автоматов, кодированию состояний автоматов, оптимальной реализации логич. сетей в различных элементных структурах и т. д. Структурная А. т. тесно связана с теорией кодирования, общей теорией переключательных функций, теорией комбинационных схем, теорией информации, теорией надёжности дискретных устройств и т. п. Третьим разделом А. т. является теория вероятностных автоматов и самоорганизующихся систем. Осн. приложения А. т. имеет в практике проектирования и автоматизации проектирования дискретных устройств и, в частности, вычислит, машин. Она приобретает всё более важное значение для таких классич. математич. дисциплин, как теория алгоритмов, с одной стороны, и таких совр. теорий в математике и кибернетике, как теория формальных систем, теория программирования, теория формальных языков и грамматик - с другой. Лит.: Автоматы.
Сб. ст., под ред. К. Э. Шеннона и Дж. Маккарти, пер. с англ., М., 1956;
Глушков В. М., Синтез цифровых автоматов, М., 1962; его же, Введение в
кибернетику, К., 1964; Кобринский Н. Е., Трахтенброт Б. А., Введение в
теори ю конечных автоматов, М., 1962; Логика. Автоматы. Алгоритмы, М.,
1963; Гилл А., Введение в теорию конечных автоматов, пер. с англ., М.,
1966. Ю.В.Капитонова. АВТОМАШИНИСТ железнодорожный, автоматич. устройство, помогающее машинисту выполнять график движения с повышенной точностью. Эффективно применяется при малых интервалах между поездами (метрополитен, пригородное ж.-д. сообщение). Система авто-матич. управления движением поезда впервые создана в Советском Союзе. В 1958 под Москвой были проведены испытания пригородного поезда с А., к-рый обеспечил выполнение графика и точность остановки поезда. Первое упоминание об А. за рубежом относится к 1959, а сообщение об испытаниях первого поезда с А. в нью-йоркском метро появилось в 1960, где А. решал лишь задачу точной остановки поезда, но не контролировал выполнение графика. Первые образцы А. для поездов пригородного сообщения за рубежом появились в 1965 для железнодорожного узла в Сан-Франциско (США). А. действует по программе 1 (см. рис.), отражающей заданный график движения и содержащей граничные условия движения (допустимые скорости V , интенсивности разгона и замедления и т. п.). При движении поезда по пути S А. сравнивает действительное время t с программным t и, с учётом граничных условий, с помощью блока 2 меняет режимы Р ведения поезда, выбирая момент или точку пути для перехода от одного режима к другому. В упрощённых системах функции автоматики ограничены сравнением времени и скорости движения с программными. Результат сравнения в виде отклонения от графика или резерва повышения скорости AV с помощью табло 3 и 4 сообщается машинисту, к-рый принимает решение об изменении режима. Схема работы автомашиниста. Блок программы движения поезда может быть расположен на центр, пункте (централизов. система), на пути (распределённая система) или на поезде (автономная система). В первом случае команды об изменении режима движения для каждого поезда вырабатываются в вычислит, центре на основании информации, поступающей от всех поездов, и передаются на нужный поезд, для чего каждый поезд должен иметь свой адрес, присвоенный ему либо участку, по к-рому он движется, независимо от номера поезда. На поезде сохраняются только исполнительная аппаратура и устройства для передачи информации и приёма команд. Эта система наиболее перспективна, однако требует большого числа каналов двусторонней связи между центральным пунктом и движущимся поездом. При расположении блока программы на пути роль центр, пункта ограничивается передачей единого для всех поездов времени, сигналов, корректирующих движение поезда, и, при наличии более чем одной программы,- сигналов, включающих нужную из программ. Устройства на поезде такие же, как и в первом случае. Такой способ наиболее приемлем для участков с однотипными поездами /метрополитены). Расположение блока программы на локомотиве (поезде) позволяет вести по участку разнотипные поезда. Число каналов связи с центр, пунктом минимальное и может ограничиваться передачей единого времени. Программа выбирается автоматически, дистанционно или машинистом в соответствии с номером нитки графика. Способ наиболее пригоден при постепенном переводе поездов на автоматич. управление. Система А. постоянно связана с другими автоматич. системами, участвующими в процессе управления движением. Она воздействует на локомотивную автоматику 5, выполняющую выбранные ею режимы, и подчиняется командам автодиспетчера 6 и автоблокировки 7. Через автодиспетчер А. взаимосвязан с др. автоматич. системами, выполняющими различные функции на ж.-д. транспорте. В перспективе А. будет составной частью комплексной системы автоматич. управления участком, дорогой. Лит.: Фаминский Г. В., Устройство и эффективность ;автомашиниста,Труды Всесоюзного науано-исследова-тельского института ж.-д. транспорта, 1967, в. 336; КекониусО. и Кольбер г Н. О.,Автомашинист для Стокгольмского метрополитена,Ежемесячный бюл. Международной Ассоциации железнодорожных конгрессов, 1967, № 2. Г. В. Фаминский. АВТОМЕТАМОРФИЗМ (геол.), изменение магматич. горной породы в процессе её отвердевания, происходящее под действием растворов, отделяющихся от породы во время её охлаждения. АВТОМЕТРИЯ (от авто... и ...метрия), научная дисциплина, изучающая теоре-тич. основы проектирования автоматич. измерит, и контрольных приборов и измерит, информационных систем (ИИС). По методам исследований А. является ветвью технич. кибернетики, ставящей своей целью автоматизацию сбора и обработки измерит, информации. А. анализирует исходные данные об исследуемых объектах и вид выходной количественной информации, обосновывает принципы построения оптимальных в заданном смысле технич. средств измерения, контроля и технич. диагностики, методы получения и обработки измерит, информации, а также исследует методы рационального планирования измерит, эксперимента и создания ИИС, предназ-нач. для использования в пром-сти, науч. исследованиях и т. п. Лит.: Карандеев К. Б., Цапенко М. П., Состояние и проблемы авто-метрии,Автометрия, 1967, № 5. М.П.Цапенко. "АВТОМЕТРИЯ", науч.-технич. журнал, орган Сиб. отделения АН СССР. Издаётся в Новосибирске. Осн. в 1965. Выходит 6 номеров в год, тираж (1969) 1700 экз. Освещает новые результаты по гл. разделам автометрии, измерит. и контрольным автоматически действующим приборам, системам и элементам, их проектированию и контролю качества, использованию; публикует материалы по исследованию и разработке новейших средств получения и обработки измерит, информации. АВТОМЕХАНИЧЕСКИЕ
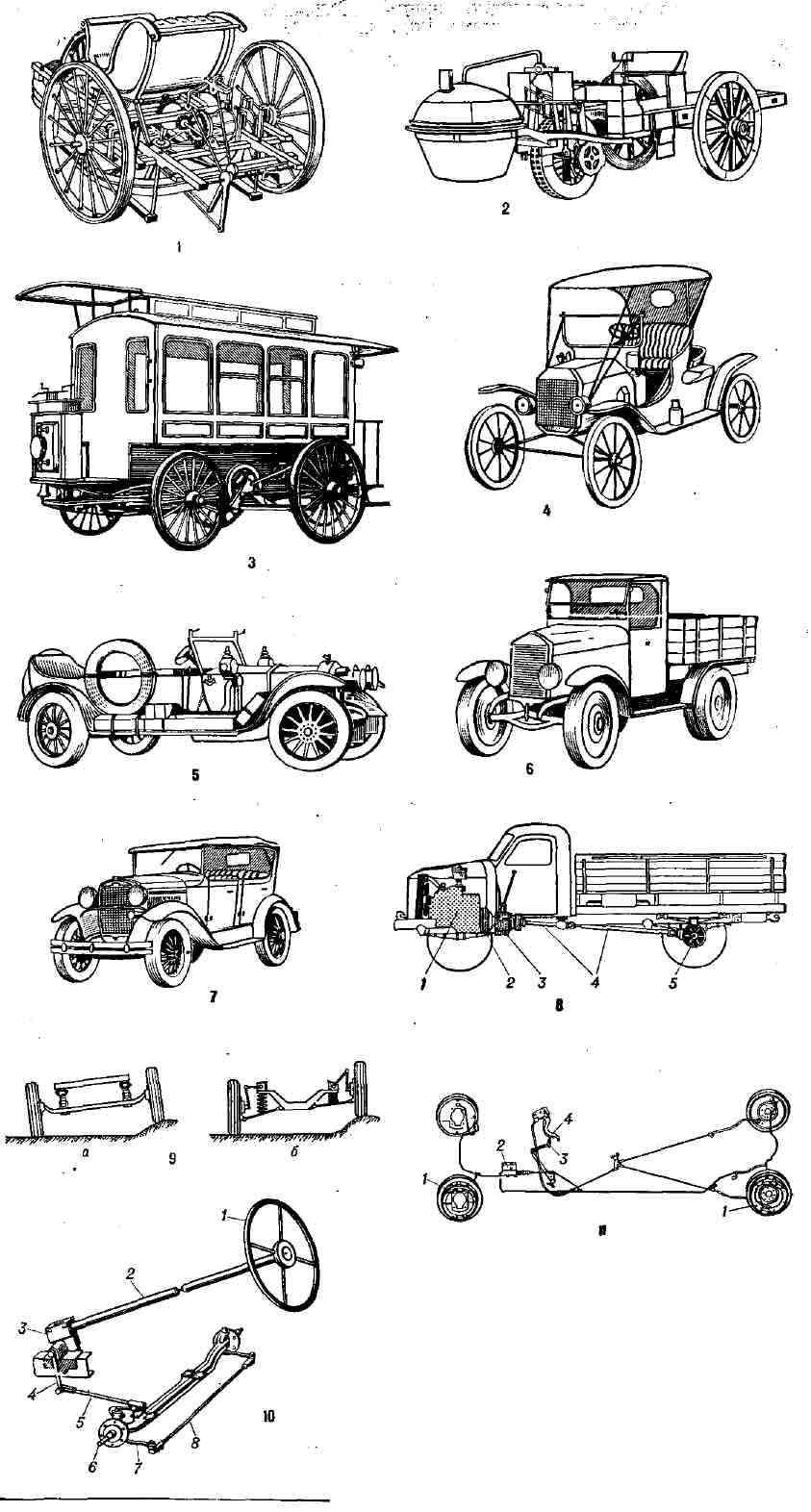
ИНСТИТУТЫ, см. Машиностроительные и механические институты. АВТОМИКСИС, аутоиксмис (от авто... и греч. mixis-смешение, совокупление), самооплодотворение, слияние половых клеток (гамет).принадлежащих одной и той же особи. А. довольно широко распространён среди простейших, многих грибов и части диатомовых водорослей. АВТОМОБИЛЕРАЗГРУЗЧИК, автомобилеопрокидыватель, устройство для выгрузки сыпучих грузов из кузовов бортовых автомобилей. А. бывают стационарные и передвижные (в т. ч. самоходные), тупиковые и проездные. Автомобилеразгрузчик с гидравлической системой подъёма: 1 - опорная рама; 2 - платформа; 3 - гидропривод; 4 - гидравлич. цилиндр. Стационарные А. обычно применяются на элеваторах (для зерна), самоходные - на зерноочистительных токах, перегрузочных площадках для гравия, щебня и др. По принципу действия различают А. с гидравлич. или механич. системой подъёма. Для разгрузки автомобиль заезжает на платформу А., оборудованную устройством для наклона на угол, обеспечивающий саморазгрузку. Для фиксации автомобиля во время наклона на платформе имеются выступы или упоры для колёс. Наклон автомобиля производится назад или на боковую сторону. И.И.Батищев. АВТОМОБИЛЬ (от авто... и лат. mobi-lis - движущийся), средство безрельсового транспорта с собственным двигателем. Историческая справка. Ещё в средние века были известны попытки создания повозок, к-рые должны были передвигаться силой ветра или мускульной силой сидящих в них людей. Довольно совершенную для своего времени машину (1752) создал рус. механик-самоучка крестьянин Леонтий Шамшуренков. Его "самобеглая коляска" приводилась в движение силой двух человек. В 1784-91 над вариантами трёх- и четырёхколёсной "самокатки" работал рус. изобретатель И. П. Кулибин. В его "самокатке" (рис. 1) были впервые применены такие элементы А., как коробка передач, рулевой механизм, тормоза, роликовые подшипники. С появлением паровой машины (2-я пол. 18 в.) создание самодвижущихся повозок быстро продвинулось вперёд. В 1769-70 во Франции Ж.Кюньо (рис.2), а через неск. лет в Англии У. Мёрдок и Р. Тревитик построили паровые А. Некоторое распространение паровые А. получили в 19 в., напр, паровые автомобили Г. Гёрни и У. Ханкока (Англия), А. Болле, А. де Диона и Л. Серполле (Франция). В 30-х гг. 19 в. были попытки установить регулярные пасс, рейсы паровых А. Много интересных проектов применения паровых А. было в России. Изобретатель и предприниматель В. Гурьев предложил (1837) создать сеть деревянных (торцовых) дорог, по к-рым могли бы регулярно совершать рейсы паровые А.-тяГачи с колёсными прицепами (повозками) летом и санными - зимой. В кон. 19 в. производились опыты по созданию электрич. А. с питанием от аккумуляторной батареи; они нашли нек-рое распространение. Рус. инженер И. В. Романов разработал (1899) оригинальную конструкцию электрич. извозчика и электробуса (рис. 3). Большое влияние на развитие конструкции А. имели изобретения дифференциала (1828, О. Пеккёр, Франция), пневматич. шины (1845, Р. Томпсон, Англия), передних управляемых колёс на цапфах (1816, Г. Ланген-шпергер, Германия), независимой подвески колёс (1878, А. Болле, Франция) и др. Широкое применение А. как транспортного средства начинается с появлением быстроходного двигателя внутреннего сгорания. Э. Ленуар (Франция) в 1862 сделал попытку установки на А. своего газового двигателя, к-рая успеха не имела. В 1885 Г. Даймлер (Германия) построил мотоцикл с бензиновым двигателем, а в 1886 его соотечественник К. Бенц взял патент на трёхколёсный А. с таким же двигателем мощностью 0,75 л. с. Последующие годы явились началом пром. произ-ва А. В 1890-е гг. появились первые А. "Панар-Левассор" и "Де Дион-Бу-тон" (Франция), в 1892 построил свой первый автомобиль Генри Форд (США) и начал их пром. произ-во в 1903 (рис. 4). Один из первых русских А. "Руссо-Балт" 1908) показан на рис. 5. Первый сов. А.- АМО-Ф15 был выпущен в 1924 (рис. 6). В 1932 в СССР началось массовое произ-во А. ГАЗ-А (рис. 7). См. Автомобильная промышленность. О развитии конструкций А. см. в статьях Грузовой автомобиль, Легковой автомобиль. С 1894 регулярно устраиваются авто-моб. гонки, к-рые сыграли большую роль в развитии конструкции А. и их распространении. Если в первой гонке ср. скорость была 24 км/ч, то уже через 5 лет она достигла 70 км/ч; в 1904 она составила 100 км/ч и в 1907 - 114 км/ч. Абс. мировой рекорд скорости составил (1968) 966,753 км/ч на А. с газотурбинным и 658,667 км/ч с поршневым двигателем. Классификация А. По назначению А. разделяются на транспортные, специальные и гоночные. Транспортные А. служат для перевозки грузов и пассажиров. Специальные А. имеют постоянно смонтированное оборудование или установки и применяются для различных целей (пожарные и коммунальные А., автолавки, автокраны и т. п.). Гоночные А. предназначаются для спортивных соревнований, в т. ч. для установления рекордов скорости (рекордно-гоночные А.). Транспортные
А. в свою очередь делятся на легковые, грузовые и автобусы. Легковые автомобили
имеют вместимость от 2 до 8 чел. Они выпускаются с закрытыми (седан и лимузин),
открытыми (фаэтон) и открывающимися (кабриолет) кузовами.
Грузовые автомобили оборудованы кузовом для перевозки груза, грузоподъёмность
их от 0,25 до 100 т. Грузовые А. без кузова или с небольшим кузовом,
предназначенным для балласта, приспособленные для буксировки прицепных
систем, наз. А.-тягачами, они бывают седельные (для полуприцепов)
н
буксирные (для прицепов). А. или А.-тягач вместе с прицепной системой
(прицеп, полуприцеп, прицеп-роспуск, прицеп-тяжеловоз) образуют
автомобильный
поезд. Автобусы, имеющие кузов вместимостью более 8 чел., подразделяются
на городские, пригородные, междугородные (туристские), местного
сообщения и др.
1 - "Самокатка" И. П. Кулибина; 2 - паровой автомобиль Ж. Кюньо; 3 -электробус И. В. Романова; 4 - "Форд"; 5 - "Руссо-Балт"; 6 - АМО-Ф15; 7 - ГАЗ-А; 8 - трансмиссия автомобиля: 1 - двигатель; 2 - сцепление; 3 - коробка передач; 4 - карданная передача; 5 - главная передача и дифференциал; 9 - подвеска автомобиля: а - зависимая; б - независимая; 10 - рулевое управление: 1 - рулевое колесо; 2 - рулевой вал; 3 - рулевой механизм; 4 - рулевая сошка; 5 - продольная рулевая тяга; 6 -поворотная цапфа; 7 - рулевой рычаг; 8 - поперечная рулевая тяга; 11 -тормозная система автомобиля ЗИЛ-110: 1 - тормозной механизм колёс; 2 - главный тормозной цилиндр; 3 - педаль тормоза; 4 - рукоятка ручного тормоза. По проходимости А. разделяются на дорожные, внедорожные (карьерные) и А. повышенной и высокой проходимости. Дорожные предназначены для эксплуатации по общей сети автомоб. дорог. Внедорожные, имеющие увеличенные габаритные размеры и осевые нагрузки, могут использоваться только на спец. дорогах, напр, в карьерах. А. повышенной и высокой проходимости рассчитаны на работу в тяжёлых дорожных условиях и по бездорожью. Основной вид таких А.- колёсные полноприводные (т. е. имеющие привод ко всем колёсам). Кроме колёсных, различают ещё следующие А. высокой проходимости: колёсно-гусе-ничные со сменными гусеничными движителями или колёсами; полугусеничные, имеющие одновременно гусеничные движители и колёса; снегоходы с движителями в виде широких гусениц или шнеков; А. на пневмокатках; "амфибии" - колёсные А. с водонепроницаемым кузовом и дополнит, движителем в виде гребного винта; А. на воздушной подушке, приводимые в движение тяговым воздушным винтом или реакцией направляемой назад струи воздуха от компрессора; шагающие А., передвигающиеся с помощью перемещающихся лыж. Проходимость обычных дорожных А. может быть существенно улучшена установкой на их задние ведущие колёса арочных шин с очень широким профилем и высокими грунтозацепами. Конструкция А. Автомобиль состоит из двигателя, трансмиссии, ходовой части, механизмов управления, электрооборудования, кузова для перевозки пассажиров или грузов и кабины (у грузовых А.). В зависимости от рода двигателя различают: паровые А. (распространения не имеют); бензиновые А.- с двигателем внутр. сгорания, работающим на автомобильном бензине (большинство легковых А. и грузовых А. малой и средней грузоподъёмности); дизельные А.- с двигателем внутр. сгорания, работающим на дизельном топливе (преимущественно грузовые А. большой грузоподъёмности и многоместные автобусы); газобаллонные автомобили - с газовым двигателем внутр. сгорания, работающим на сжатых или сжиженных горючих газах, запас к-рых находится в установленных на А. баллонах (распространены только в районах с дешёвым газовым топливом); газогенераторные автомобили - с двигателем внутр. сгорания, работающим на газе, получаемом из твёрдого топлива (древесных чурок, угля, торфа и различных брикетов) в газогенераторе, установленном на А. (получили массовое применение в годы Великой Отечеств, войны вследствие дефицита жидких топлив); газотурбинные автомобили - с газовой турбиной (пока распространения не получили, но перспективны для применения в качестве тяжёлых и внедорожных грузовых А. и скоростных междугородных автобусов); электрич. А.- с двигателем, работающим от аккумуляторных батарей (из-за малого запаса хода и большого веса пока используются в небольшом количестве, гл. обр. как грузовые А. малой грузоподъёмности для работы в городах, перспективны как легковые и грузовыепосле пром. освоения аккумуляторов большой ёмкости при малом весе). См. также Автомобильный двигатель. Трансмиссия (силовая передача) передаёт вращающий момент от двигателя к движителю А. (колёсам, гусеницам и др.). Трансмиссия может быть: механической,электромеханической и гидромеханической. Наиболее распространена механич. трансмиссия (рис. 8), к-рая обычно состоит из сцепления - муфты, дающей возможность кратковременно разъединить и плавно соединить двигатель и последующие механизмы трансмиссии; коробки передач -шестерённого ступенчатого редуктора, позволяющего изменять в широких пределах вращающий момент на ведущих колёсах (тяговую силу) и осуществлять задний ход; карданной передачи - валов с шарнирами, передающих вращающий момент от коробки передач к главной передаче при изменяющихся углах между их валами; главной передачи - шестерённого редуктора, постоянно повышающего вращающий момент, передаваемый от коробки передач к ведущим колёсам; дифференциала - механизма, распределяющего вращающий момент от главной передачи между ведущими колёсами, благодаря чему они вращаются на поворотах и неровностях дороги с разными угловыми скоростями; полуосей, передающих вращающий момент на ведущие колёса (см. рис. на вклейке к стр. 152). Главные передачи, выполняемые ранее в виде пары конич. шестерён с прямыми зубьями (у грузовых А. в виде двух пар - цилиндрической и конической), делают со спиральными зубьями или с гипоидным зацеплением. При поперечном расположении двигателя главные передачи выполняются в виде цилиндрич. передач. На нек-рых А. высокой проходимости или большой грузоподъёмности применяют разнесённые главные передачи в виде центрального конич. редуктора и бортовых (колёсных) редукторов (пары цилиндрич. шестерён с наружным или внутр. зацеплением, планетарного редуктора). Наиболее перспективны бесступенчатые передачи, к-рые значительно облегчают управление, улучшают комфортабельность езды и проходимость А. Эти передачи часто наз. автоматич. трансмиссиями, поскольку в них передаточное число изменяется автоматически с помощью аппаратуры автоматич. управления коробкой передач или совместного действия трансформатора момента и аппаратуры автоматич. управления. Широко распространены гидромеханич. (гидротрансформатор и ступенчатая механич. коробка передач), гидрообъёмные (гидронасос и гидромоторы) и электромеханич. (генератор, электродвигатели и механич. редукторы) трансмиссии. Гидромеханич. передачу чаще всего применяют для легковых А. высокого класса и больших гор. автобусов, электромеханич.- для особо тяжёлых грузовых А. См. Гидродинамическая передача. Ходовая часть А. состоит из рамы, подвески, осей (мостов) и колёс. Рама А. служит для установки кузова, кабины, двигателя, коробки передач и др. механизмов и узлов. У большинства легковых А. и автобусов раму заменяет кузов, к-рый в этом случае представляет собой прочную и жёсткую несущую систему. Подвеска А. выполняет упругую связь рамы или несущего кузова с осями (мостами). При помощи подвески осуществляется передача сил, действующих на., колёса, раме (кузову), смягчаются динамич. нагрузки, колебаниям придаётся желаемый характер, что обеспечивает необходимую плавность хода и устойчивость А. при движении. Долгое время на А. применялась подвеска в виде листевых рессор, затем в качестве упругого элемента стали использовать также витые пружины, торсионы, пневматич. или гидропневматич. элементы. Для быстрого гашения колебаний в систему подвески вводятся амортизаторы (обычно гидравлич. рычажные и телескопические), а для уменьшения крена на поворотах - стабилизаторы поперечной устойчивости. Широко распространена независимая подвеска колёс (рис. 9), при к-рой каждое колесо подвешено к раме отдельно, так что изменение положения одного из них не вызывает перемещения другого. На большинстве А. применяют дисковые колёса, состоящие из прикрепляемого к установленной на оси ступице диска и обода с камерной или бескамерной пневматич. щиной (см. Шина автомобильная), а для тяжёлых грузовых А. и больших автобусов - также бездисковые колёса с ободом, крепящимся непосредственно к ступице. Механизмы управления А. включают рулевое управление и тормозную систему. Рулевое управление (рис. 10) служит для изменения направления движения А., что осуществляется поворотом передних колёс вместе с цапфами, на к-рых они установлены, посредством рулевого механизма (червячная, винтовая, кривошипная или реечная передачи), связанного валом с рулевым колесом (штурвалом) и системой привода с цапфами передних колёс. Для облегчения управления А. в рулевой привод вводятся гидравлич., пневматич. или гидропневма-тич. усилители. В СССР и др. странах, где принято правостороннее движение, применяют левое рулевое управление, и наоборот. Это улучшает обзорность дороги, что особенно важно при обгоне. Рулевое управление должно обеспечивать хорошую поворотливость А. без бокового скольжения управляемых колёс на повороте при минимальном усилии на рулевом колесе, а также стабилизацию колёс при прямолинейном движении. Лёгкость управления создаётся необходимым передаточным числом рулевого механизма и рулевого привода (силовое передаточное число находится в пределах 100-300), причём передаточное число рулевого механизма часто бывает переменным. Рулевой привод осуществляет одновременный поворот управляемых колёс на различные углы с качением их без бокового скольжения. Стабилизация управляемых колёс, т. е. их способность сохранять положение, занимаемое при прямолинейном движении, и автоматически возвращаться в это положение, когда рулевое колесо будет отпущено, достигается поперечным и продольным наклоном шкворней поворотных цапф колёс. Для повышения маневренности А., особенно повышенной проходимости, делают управляемыми все колёса (2-осные А.) или колёса двух передних осей (4-осные А.). Для этой же цели выполняют поворотными колёса прицепов-роспусков или полуприцепов у автопоездов. Тормозная система служит для замедления движения и полной остановки (рабочий ножной тормоз), а также для удержания А. на месте (стояночный ручной тормоз). Рабочий тормоз действует на все колёса А. На каждом колесе устанавливают барабанный или дисковый тормозной механизм, действие к-рого осуществляется гидравлич., пневматич. или пневмогидравлич. приводом. В тормозных механизмах тормозные колодки с фрикционными накладками во время торможения прижимаются к колёсному тормозному барабану или диску. Гидравлич. привод (рис. 11), к-рый часто бывает снабжён вакуумным или пневматич. усилителем, применяется на легковых А. и грузовых А. малой грузоподъёмности, на остальных А. устанавливается преим. пневматич. привод, получающий сжатый воздух от компрессора, приводимого в действие двигателем А. Стояночный тормоз действует обычно только на ведущие колёса (непосредственно или через трансмиссию). Для повышения надёжности тормозов применяют раздельный привод от одной педали на передние и задние колёса или дублированный привод на задние колёса. На больших автобусах и тяжёлых грузовых А. всё больше используют дополнительные тормоза-замедлители, в к-рых часто тормозной момент создаётся двигателем при перекрытом выпускном трубопроводе и прекращении подачи топлива. Применяются также тормоза-замедлители с независимым от двигателя электрич. или гидравлич. тормозящим устройством, действующим на трансмиссию А. Электрооборудование А. состоит из источников тока (аккумуляторной батареи и установленного на двигателе генератора) и нескольких групп потребителей, оно необходимо для работы системы зажигания и пуска двигателя, а также для приборов наружного и внутр. освещения, световой и звуковой сигнализации А. Система наружного освещения и сигнализации включает: наружное головное освещение, осуществляемое фарами с ближним и дальним светом (свето-технич. параметры фар подбираются так, чтобы обеспечить видимость дороги вперёд на 100-150 м при движении с большими скоростями и безопасный разъезд на сравнительно узкой дороге без ослепления водителей встречных А.); белые или жёлтые фонари (подфарники), обозначающие спереди габариты А. при его движении в тёмное время суток с выключенными фарами по хорошо освещённым улицам и дорогам; задние (красные) фонари, обозначающие габариты А. сзади; указатели поворотов (фонари с мигающими огнями, установленные спереди и сзади, а иногда и с боковых сторон А.); фонари светового стоп-сигнала для оповещения о торможении. Кроме того, могут устанавливаться противотуманные фары, габаритные фонари и отражатели, а также спец. светящиеся знаки (автопоезд, такси и т. п.). В нек-рых странах введены мигающие задние красные фонари для обозначения стоящего на дороге А. Степень совершенства конструкции А. оценивается по компактности конструкции - рациональное использование габаритов и массы, обеспечивающее необходимую грузо- или пассажировместимость А. при минимальных затратах материалов на его изготовление; по динамичности - интенсивность разгона, устойчивость движения на прямой передаче, макс, скорость, тяга на крюке (для автопоездов); по топливной экономичности - расход топлива на выполненную транспортную работу (грузовые А. и автобусы) или на 1 км пробега (легковые А.); по проходимости - гео-метрич. параметры шасси и кузова (дорожный просвет, углы свесов, радиусы продольной и поперечной проходимости), тягово-сцепные свойства, удельное давление на грунт; по удобству пользования- степень обеспечения сохранности грузов в пути и лёгкость выполнения погрузочно-разгрузочных работ, комфортабельность перевозок пассажиров (размеры сидений, проходов, высота подножек, ширина дверей, мягкость подвески, отопление, вентиляция и т. п.); по лёгкости управления - размер усилий и количество необходимых для управления действий водителя, манёвренность А., лёгкость пуска двигателя, запас хода и др.; по безопасности движения - устойчивость управляемого движения, надёжность торможения и длина тормозного пути, обзорность дороги, эффективность освещения и сигнализации и др.; по приспособленности к технич. обслуживанию и ремонту - периодичность и трудоёмкость технич. обслуживания и ремонта, лёгкость доступа к агрегатам и узлам при их осмотре, регулировке и ремонте; по долговечности и надёжности - сроки службы, межремонтные пробеги, потребность в ремонтных работах, стабильность рабочих процессов, интенсивность отказов, бездефектность и др. Совершенствование конструкции А. предусматривает макс, автоматизацию управления рабочими процессами агрегатов, механизмов и систем, а также управления движением А. Созданы А., к-рые могут работать по заданному маршруту без водителя или при миним. его участии. Большое внимание уделяется при конструировании новых моделей А. повышению общей надёжности и сведению до минимума необходимых операций технич. обслуживания. У перспективных моделей отсутствуют узлы, нуждающиеся в регулировке, в систематич. добавке масла (применены антифрикц. материалы или долговечная смазка), а жидкие масла (в двигателе, трансмиссии) могут сменяться через длительный период (30- 50 тыс. км). В СССР создан и периодически уточняется перспективный типаж А., в, основе к-рого лежит полное удовлетворение потребностей нар. х-ва и населения в А. различного назначения, грузоподъёмности и пассажировместимости. Этот типаж предусматривает целесообразное и экономически оправданное количество базовых моделей с большим числом модификаций на основе широкой конструктивной унификации агрегатов, узлов и деталей. Т. о., обеспечивается надёжная и эффективная работа А. в различных климатич. и дорожных условиях при миним. затратах на их обслуживание и ремонт. Лит.: Чудаков Е. А., Автомобиль, 4 изд., т. 1 - 3, М.- Л., 1937; Автомобиль, 3 изд.. М., 1951; Гольд Б. В., Фалькевич Б. С., Теория, конструирование и расчет автомобиля, М., 1957; Исаев А. С., От самобеглой коляски до ЗИЛ-111, М., 1961; Гагарин Е. И., Леонтий Лукьянович Шамшуренков. [Изобретатель], М., 1963; Литвинов А. С., РотенбергР. В., ФрумкинА. К., Шасси автомобиля, М., 1963; Анохин В. И., Отечественные автомобили, 2 изд., М., 1964; Автомобили. Устройство, эксплуатация и ремонт. 2 изд., М.. 1965; Бухарин Н. А. [и др.], Автомобили. Теория рабочих процессов, М.-Л., 1965: Бурков М. С., Специализированный подвижной состав автомобильного транспорта, М.. 1966; Иларионов В. А., Эксплуатационные свойства автомобиля, М., 1966; Бекман В. В., Гоночные автомобили, Л., 1967; Автомобиль. Эксплуатация и ремонт, М., 1968 (Энциклопедический словарь-справочник). Л. Л. Афанасьев. АВТОМОБИЛЬ-ВЫШКА, автомобиль, оборудованный устройством подъёма рабочих и инструмента для ремонта и монтажа контактной сети трамвая и троллейбуса, линий связи и электропередач, а также для ремонта, окраски, очистки зданий и сооружений, ухода за древонасаждениями и т. п. Распространены А.-в. с те-лескопич. подъёмником (рис.), имеющим привод от двигателя автомобиля через коробку отбора мощности. Высота подъёма люльки или рабочей площадки подъёмника от 6 до 23 м. Для устойчивости подъёмника во время работы А.-в., как правило, оборудуют аутригерами (опорами). Автомобиль вышка
Управляется подъёмник (подъём, спуск, поворот люльки или рабочей площадки) из кабины автомобиля и из люльки (рабочей площадки) подъёмника. И. И. Батищев. АВТОМОБИЛЬ-МАСТЕРСКАЯ, предназначен для технич. обслуживания и текущего ремонта автомобилей и прицепов,работающих в отрыве от своих основных баз (строительство дорог, ремонт с.-х. техники в полевых условиях и т. д.). А.-м. изготовляют на базе шасси грузовых автомобилей, преим. повышенной проходимости, на которое устанавливают лёгкий пылевлагонепроницаемый кузов. На А.-м. размещаются различное оборудование, приборы и инструменты, автономная передвижная электростанция, грузоподъёмные средства и др. АВТОМОБИЛЬНАЯ ДОРОГА, комплекс сооружений для безопасного и удобного движения автомобилей с расчётными скоростями и нагрузками. Начавшееся в кон. 19 в. развитие автомоб. транспорта потребовало создания удобных путей для движения автомобилей; пока скорости их движения были невелики, ограничивались приспособлением гужевых дорог, проводя мероприятия по борьбе с пылью и предохранению дорожного покрытия от быстрого разрушения. С ростом интенсивности движения, повышением скоростей и нагрузок стали производить более капитальные переустройства гужевых дорог, расширяя проезжие части, устраняя крутые подъёмы и спуски, увеличивая радиусы закругления, применяя беспыльные и прочные дорожные покрытия и т. п. После 1-й мировой войны во всех странах стали строить только А. д., специально рассчитанные и спроектированные для движения автомобилей (носящие назв. во Франции autoroute, в Англии motorway, в Италии autostrada, в США highway и т. п.). В зависимости
от назначения в общей транспортной сети СССР и от расчётной интенсивности
движения (предполагаемое через 20 лет число автомобилей в среднем за год,
к-рые будут проходить за сутки по дороге в обоих направлениях) А.
д. разделяют на 5 технич. категорий. Чем выше расчётная интенсивность движения,
тем выше категория дороги и её технич. характеристики, в первую
очередь расчётная скорость движения (для 1-й категории 150 км/ч, для
5-й категории 30 км/ч). Расчётная скорость - наибольшая по условиям
безопасности движения скорость одиночного легкового автомобиля.
Технич. классификация А. д. СССР приведена в табл. 1. Основные элементы, определяющие поперечный профиль автомобильной дороги (рис. 1): расстояние а между бровками в, условно наз. шириной земляного полотна; проезжая часть б, обочины г для временной остановки автомобилей; резервы д, из к-рых берут грунт для возведения земляного полотна; обрезы е - части дорожной полосы для размещения пешеходных и велосипедных дорожек, зелёных насаждений, линий связи, линейных зданий, транспортных устройств и т. д. На проезжей части устраивают дорожную одежду. Покрытие ж - верхний слой дорожной одежды, сооружаемый из наиболее прочных дорожно-строи-тельных материалов, воспринимает нагрузку от колёс автомобилей. Покрытие должно быть ровным, с шероховатой поверхностью и обеспечивать хорошее сцепление с колёсами автомобиля. Основание з - несущий слой дорожной одежды, воспринимающий расчётную нагрузку автомобилей. Дополнит, слой основания и имеет различное назначение (дренирующий, морозоустойчивый и т. п.). Для лучшей видимости границ проезжей части иукрепления краёв покрытия устраивают краевые полосы к, отличающиеся от покрытия цветом. В местах прохода А. д. через водотоки (реки, ручьи и т. п.), ущелья, а также в местах пересечения с др. путями сообщения устраивают искусств, сооружения - мосты, трубы, путепроводы, транспортные развязки и др. (рис. 2). Бурный рост
автомобильного транспорта вызвал увеличение интенсивности движения по А.
д. как грузовых, так и легковых
автомобилей.
Это потребовало
специальных мероприятий, обеспечивающих повышение безопасности,
регулирование движения и обслуживание проезжающих: вдоль бровок устанавливают
или подвешивают над проезжей частью дорожные знаки и указатели, на крутых
поворотах устраивают виражи (односкатные уклоны проезжей части к центру
кривой), ограждения дороги, производят разметку проезжей части,оборудуют
светильниками и т. д.; для обслуживания пассажиров и водителей сооружают
автовокзалы, автопавильоны, автозаправочные станции, станции технического
обслуживания, мотели, кемпинги и т. п., а для обеспечения грузовых перевозок,
кроме
того,- грузовые автостанции, склады, оборотные гаражи и т. п. Одной
из важнейших транспортно-эксплуатац. характеристик А. д. является её пропускная
способность (ПС), т. е. макс, число автомобилей, к-рое без заторов
может пройти через данный участок А. д. в течение определённого промежутка
времени (напр., за час). Величина ПС в основном зависит от ширины
и количества полос движения, радиусов закруглений и продольных уклонов,
состава транспортного потока, скорости движения, погоды. Макс. ПС двухполосной
А. д. шириной 7-7,5 м при благоприятных дорожных условиях (сухое
покрытие, открытый незастроенный прямолинейный и горизонтальный участок
без пересечений в одном уровне и т. д.) составляет ок. 2 тыс. легковых
автомобилей в час или, примерно, 20 тыс. легковых автомобилей в сутки.
Наличие грузового движения резко снижает ПС и при 70-80% грузовых автомобилей
в транспортном потоке ПС двухполосной А. д. шириной 7-7,5 м
составляет
8-9 тыс. автомобилей в сутки. Если фактич. интенсивность движения на А.
д. превышает величину ПС, образуются заторы и транспортно-эксплуатац. показатели
А. д. резко снижаются.
Строительство А. д. в СССР осуществляют с помощью высокопроизводит. дорожных мащин по поточному методу с применением комплексной механизации. При возведении земляного полотна широко используют бульдозеры, скреперы, автогрейдеры и др. Отд. конструктивные элементы и детали дорожных сооружений изготовляют на специально оборудованных полигонах и заводах. Асфальте- и цементобетонные смеси приготовляют на автоматизиров. смесительных установках. Полностью механизировано устройство усовершенствованных дорожных покрытий и оснований для них. При эксплуатации А. д. бесперебойное движение поддерживает служба ремонта и содержания А. д., а регулирование и обеспечение безопасности осуществляют Госавтоинспекция. Осн. направления технич. прогресса в строительстве А. д.: повышение транс-портно-эксплуатац. качеств дорожных покрытий и их сроков службы, внедрение более совершенной технологии строительства и уменьшение зависимости выполнения строит, работ от климатических условий. Лит.: Строительство автомобильных дорог, под ред. Н. Н. Иванова, т. 1 - 2, М., 1963-64; Автомобильные дороги, М., 1964. В. К. Некрасов. Сеть автомобильных дорог. Повсеместное строительство А. д. было вызвано быстрым ростом автомобильного парка. Если в 1913 длина находившихся в эксплуатации дорог общего пользования составляла не более 25 тыс. км, то сеть А. д. в 1965 насчитывала св. 18 млн. км (см. табл. 2). Размещение А. д. по частям света в 1965 (без СССР и др. социалистич. стран) показано в таблице 3. Густота сети А. д. (1964) составляла в среднем на земном шаре 24 км (на 100 км2 обжитой территории), в т. ч. в капиталистич. и развивающихся странах - 30 км (из них в слаборазвитых странах -9,7 км), в социалистич. странах-11,0 км (в т. ч. в СССР - 9,6 км). Тот же показатель на 10 тыс. жит. выглядит так: мир в целом - 56 км; капиталистич. и развивающиеся страны - 72 км, в т. ч. слаборазвитые-23 км; социалистические страны - 24 км, в т. ч. СССР - 59 км. Важнейшие А. д. мира. Зап. Европа: Лондон - Париж - Ницца - Рим-Палермо; Лондон - Лозанна - Милан - Бриндизи; Лисабон - Париж - Стокгольм; Лисабон - Берн - Копенгаген - Стокгольм - Хельсинки; Лондон - Вена - Будапешт - Белград - Александру полис - Стамбул; Рим -Берлин - Осло - Стурдаль; Рим - Вена - Варшава; Лондон - Гаага - Берлин - Варшава; (Париж) - Прага - Варшава - (СССР); Триест - Прага -Щецин - Гамбург - Берлин - Прага - Будапешт - Бухарест - Констанца; Берлин - Вроцлав - Краков - Пшемысль - (СССР). Азия: Базерган (граница с Турцией) - Хой - Тегеран - Мешхед - Герат - Кабул - Пешавар - Исламабад - Дели - Дакка - Кало - Пномпень - Сайгон и Тегеран - Керман - Лахор - Дели (далее через Непал) - Дакка - Рангун- Бангкок - Куала-Лумпур -Сингапур - Джакарта - Денпасар (о. Бали). Африка: Каир - Александрия - Триполи - Тунис - Алжир - Танжер, Каир - Луксор - Хартум, Алжир - Нигер, Алжир - Конго, Танжер - Дакар. Сев. Америка: Вашингтон - Нью-Йорк - Олбани - Буффало, Чикаго - Омаха - Шайенн -Сан-Франциско, Чикаго - Сент-Луис - Новый Орлеан (США); Торонто - Монреаль (Канада). Лат. Америка: Нуэво-Ларедо - Мехико - Гватемала - Сан-Сальвадор - Манагуа - Сан-Хосе, Рио-де-Жанейро - Сан-Паулу - Монтевидео - Буэнос-Айрес - Вальпараисо, Каракас - Богота - Кито - Лима - Ла-Пас - Буэнос-Айрес. Австралия:
Мельбурн - Сидней - Брисбен, Мельбурн - Аделаида - Порт-Огаста, Джералдтон
- Перт - Олбани.
А. д. СССР. Сооружение А. д. в СССР осуществляется с учётом размещения населённых пунктов, ж. д., водных и возд. путей сообщения и трубопроводов. По нар.-хоз. значению, характеру обслуживаемых ими населённых пунктов А. д. делятся на: общего с. значения, обеспечивающие межреспубликанские связи и соединяющие столицы союзных республик между собой и важнейшими экономич. центрами, а также обслуживающие междунар. сообщения, аэропорты и курорты общесоюзного значения; респ. значения - обеспечивающие межобластные связи и соединяющие респ. и обл. центры между собой и важными экономич. центрами областей, ж.-д. станциями и портами, а также подъезды к А. д. общегос. значения; областного значения - обеспечивающие внутриобл. связи и соединяющие центры обл. с гор. и районными центрами, а также важные пром. и с.-х. пункты с сетью дорог респ. значения, ж.-д. станциями и портами; местного значения, обеспечивающие внутрирайонные связи и соединяющие райцентры между собой и с отд. населёнными пунктами, совхозами и колхозами; ведомственные, находящиеся в ведении отд. министерств (лесного х-ва, нефтедобывающей пром-сти, цветной металлургии и др.). А. д., соединяющие
относительно удалённые друг от друга важные в экономич. и оборонном отношении
районы и пункты и обеспечивающие массовое скоростное движение, наз. магистральными
(см. Автомобильная магистраль).
Строительство А. д. осуществляется за счёт гос. капитальных вложений, отчислений от прибылей автотрансп. предприятий, а строительство местных А. д.- с привлечением к участию пром., с.-х. и др. хоз. предприятий и колхозов. Строительство А. д. широко развернулось в годы предвоенных пятилеток. В этот период была проведена реконструкция старых шоссе и построен ряд новых А. д. С 1913 по 1940 общее протяжение дорог с твёрдым покрытием увеличилось в 4 раза. В послевоен. годы проведены большие работы по восстановлению и ремонту А. д., построено много новых дорог с усовершенствованными покрытиями, а также крупных транзитных магистральных А. д., по к-рым осуществляется регулярное грузовое и пассажирское сообщение на дальние расстояния. За период с 1940 по 1966 протяжение А. д. с твёрдым покрытием возросло в 3 раза и составляв! 456 тыс. км (на конец 1968). За это же время протяжение А. д. с усовершенствованными покрытиями возросло более чем в 20 раз (достигнув 145 тыс. км). Для большего удобства пользующихся дорогами и обеспечения безопасности движения важнейшим автомобильным магистралям присвоены маршрутные номера. Москва - Ленинград (719 км; маршрут № 10) - первая в России дорога с твёрдым покрытием. Построена в 1722-46 (твёрдое покрытие с 1817 по 1834). Реконструирована в 1953-58. Подъезды к аэровокзалу Шереметьево и Завидовскому заповеднику. Скоростное движение до аэропорта Шереметьево без пересечений. Проходит через Клин, Калинин (обход), Валдай, Новгород. Вместе с А. д. Ленинград - Выборг (200 км) составляет магистральную А. д. Москва - Минск - Брест (1054 км; маршрут № 1) - транзитная магистраль, соединяющая Центр Европ. части СССР, БССР и Польскую Народную Республику. Стр-во началось в 1936, закончено в 1954. Дорога проходит близ Гжатска, Вязьмы, Смоленска, Орши, Борисова, Барановичей, Кобрина. Москва - Харьков - Симферополь (1395 км; маршрут № 4). Связывает Центр Европ. части СССР с Украиной, курортами Крыма. Участок Москва - Харьков построен в 1840-60. Дорога полностью реконструирована в 1946-50. Проходит черев Серпухов, Тулу, Орёл, Курск, Белгород, Красно-град, Новомосковск, Запорожье, Мелитополь, Джанкой. От Симферополя А. д. отходят на Евпаторию, Севастополь, Ялту, Феодосию и Керчь. Москва - Воронеж - Рос-тов-на-Дону (1065 км; маршрут № 5). Соединяет Центр, районы с Сев. Кавказом. В г. Шахты примыкает к А. д. Киев - Харьков - Ростов-на-Дону. Отд. участки дороги построены во 2-й пол. 19 в.; участок Кашира - Воронеж реконструирован в 1957-61. Стр-во дороги полностью закончено в 1967. Проходит через Ступино, Каширу (мост через р. Оку), Ефремов, Елец, Богучар, Мил-лерово, Каменск-Шахтинский. Москва - Горький - Казань (819 км). Соединяет Москву с Поволжьем. Построена в 1839-89. Участок Москва - Горький реконструирован в годы 2-й и 3-й пятилеток в связи с постройкой Горьков-ского автозавода. Коренная реконструкция произведена в 1954-63. А. д. проходит через Ногинск, Владимир, Вязники, Чебоксары. Подъезды к Володарску, Дзержинску. Со строительством участка Казань - Свердловск А. д. войдёт в маршрут № 8. От г. Владимира отходит А. д. на г. Суздаль, Иваново. Москва - Куйбышев (1070 км; маршрут № 7). Соединяет Центр со Ср. Поволжьем. Проходит через Коломну, Рязань, Пензу, Сызрань, Тольятти. Реконструирована в 1957-65. В ближайшие годы после завершения сооружения А. д. Куйбышев - Уфа - Челябинск будет обеспечена связь с районом Урала. Московская кольцевая А. д. (МКАД, 109 км) -скоростная автомагистраль. Построена в 1958-62. Обеспечивает распределение движения примыкающих магистральных дорог. С 1960- граница Москвы. Ленинград - Киев - Одес-с а (1744 км; маршрут № 20) - транзитная Балтийско-Черноморская магистраль. Участок Ленинград - Киев построен в 1838-88, реконструирован после Великой Отечеств, войны. Участок Киев- Одесса построен в 1955-60. Проходит через Лугу, Псков, Витебск, Оршу, Могилёв, Гомель, Чернигов, Белую Церковь, Умань. Ленинград - Таллин - Рига - Калининград (1045 км; маршрут № 21) - осн. прибалтийская А. д. Проходит через Нарву, Пярну, Елгаву, Шяуляй. Киев - Харьков - Ростов-на-Дону (950 км; маршрут № 13) - крупнейшая широтная магистраль УССР. Построена в 1946-52. Проходит через Полтаву, Славянск, Артёмовск, Шахты, Новочеркасск. Ростов-на-Дону - Новороссийск (415 км; маршрут № 18). Построена в 1954-59. Выход к Черноморскому побережью Кавказа. Проходит через Краснодар. Черноморское шоссе (Новороссийск - Батуми) (750 км; маршрут № 19). Построено в 1887- 1910. Восстановлено в 1946-50. Продолжаются работы по спрямлению и расширению участков с большим авто-моб. движением. Подъезды к Адлеру, Абрау-Дюрсо, ст. Мацеста, оз. Рица, Пицунде и др. В Самтредиа отходит А. д. на Тбилиси, Ереван, Баку (маршруты №№ 15, 17). Ростов - Беслан - Баку (1332 км; маршрут № 14) - основная автомагистраль Сев. Кавказа. Построена в 1945-55 до Орджоникидзе, на остальном протяжении в 1956-65. Промежуточные пункты: Тихорецк, Армавир, Минеральные Воды, Пятигорск, Нальчик, Сумгаит. Подъезды к Краснодару, Орджоникидзе, Грозному, Махачкале. Беслан - Тбилиси - Ереван (533км; маршрут № 16). Соединяет кратчайшим путём Сев. Кавказ и Закавказье. Промежуточные пункты: Орджоникидзе, Ленинакан. Участок Орджоникидзе - Тбилиси (208 км) наз. Военно-Грузинской дорогой. Из Тбилиси отходят А. д. на Баку, Ереван, Батуми. Алма-Ата - Фрунзе - Ташкент (812 км). Построена в 1957-65. Гл. автомагистраль Юж. Казахстана. Проходит через Джамбул - Чимкент. Ташкент - Термез (708 км) - Большой узбекский тракт им. В. И. Ленина. Построен в 1940. В наст, время (1968) производится коренная реконструкция со спрямлением и уширением отд. участков. Проходит через Гулистан, Янгиер, Джизак, Самарканд. Вместе с предыдущей А. д. составляет маршрут № 36. Фрунзе - Ош (605 км). Построена в 1956-65. Гл. автомагистраль Кирг. ССР, соединившая кратчайшим путём сев. и юж. области республики. Проходит через Токтогул, Таш-Кумыр, Джалал-Абад. Крупнейший в СССР автодорожный тоннель (2,5 км) на высоте 3,2 км. Ош - Хорог (701 км) - Памирский тракт. Вместе с дорогой Фрунзе - Ош составляет маршрут № 37. Дорога построена в 1931-34. Обеспечивает перевозки грузов для Горно-Бадахшанской АО. Проходит по терр. Кирг. ССР и Тадж. ССР. Проложена по высокогорной местности (нек-рые перевалы имеют высоту более 4 км). В зимнее время движение прерывается. Проводится реконструкция. Бийск - Ташанта (626 км) - Чуйский тракт. Строился в 1903-13 как гужевой тракт в Монголию. Реконструирован в 1932-36 и в послевоен. время. Обслуживает связи Горно-Алтайской АО и внешне-торговые перевозки. Проходит по долине pp. Катуни и Чуй. Подъезд к Горно-Алтайску. Продолжением Чуйского тракта в МНР является Зап.-Монгольский тракт. Чуйский тракт является частью А. д. Новосибирск - Бийск - Ташанта общим протяжением 1040 кл (маршрут № 34). Абакан - Кызыл (436 км; маршрут № 35) - Усинский тракт (назв. от р. Ус - притока Енисея). Построен в 1911-17 как гужевой тракт. Пересекает Зап. Саяны. Обслуживает трансп. связи Тув. АССР. Проходит через Минусинск (ж.-д. станция). Подъезд к Шушенскому. В ближайшие годы будут построены и реконструированы А. д.: Москва - Рига, Москва - Волгоград, Москва - Брянск- Киев, Куйбышев - Челябинск, Казань- Ижевск - Свердловск, Челябинск - Караганда, Полтава - Кишинёв, Тольятти - Куйбышев и др. В авг. 1968 принято постановление ЦК КПСС и Сов. Мин. СССР о дальнейшем развитии дорожного стр-ва в СССР, к-рое предусматривает ежегодное увеличение темпов стр-ва и реконструкции А. д. на 20%. Объём стр-ва дорог с твёрдым покрытием к 1975 должен составить 40 тыс. км. Г. И. Шейнис. АВТОМОБИЛЬНАЯ МАГИСТРАЛЬ, автомагистраль, автомоб. дорога, предназначенная для движения только автотранспортных средств и не имеющая пересечений на одном уровне с другими путями. Рассчитана на массовое скоростное движение автомобилей. А. м. обычно прокладывают в обход городов и пром. центров, связь с к-рыми осуществляют спец. подъездными путями. А. м. проектируют и строят по нормам, установленным для автомобильных дорог 1-й категории. Проезжую часть для каждого направления движения размещают на самостоят, земляном полотне, обязательно с разделит, полосой шириной не менее 5м. При высокой интенсивности движения на А. м. предусматривается стационарное освещение; при значит, грузовом движении устраивают отд. проезжие части для легковых и грузовых автомобилей и автобусов. В соответствии с Международной конвенцией о дорожных знаках и сигналах (Вена, 1968) начало и конец А. м. должны обозначаться спец. дорожными знаками. Примерами совр. А. м. могут служить подъезд к аэропорту Домодедово (.Москва), Моск. кольцевая автомоб. дорога. За рубежом А. м. наз. скоростными дорогами. Лит.: Бабков В. Ф., Современные автомагистрали, М., 1961. АВТОМОБИЛЬНАЯ ПРОМЫШЛЕННОСТЬ, возникла в конце 19 в. в ряде стран. В 1900 в США было выпущено 4192, во Франции 2000, в Италии 355 автомобилей. Увеличению выпуска автомобилей способствовало развитие ряда отраслей пром-сти, связанных прямо или косвенно с их произ-вом и использованием: нефтяной пром-сти (бензин, дизельное топливо, моторные масла и смазки), химической (лаки, краски, стёкла для кузовов, шины, пластмассы), металлургической (спец. сталь), текстильной и др. Дореволюционная
Россия не имела своей А. п. как специализированной отрасли произ-ва. Русско-балтийский
вагоностро-ит. з-д в Риге, освоивший выпуск автомобилей в 1908, за время
своей работы (до эвакуации в 1915) выпустил всего 451 легковой автомобиль
и небольшое количество грузовых и спец. автомобилей. В авг. 1915 в России
на основе гос. кредита возникли 5 компаний, имевших целью организацию автомоб.
произ-ва для обеспечения потребностей армии. Было начато стр-во автозаводов:
в Москве - з-да Автомоб. московского об-ва (АМО), под Москвой -
з-да правления "Руссо-бал-та", в Рыбинске - з-да "Русский Рено", в Ярославле
- з-да В. А. Лебедева, в Ростове-на-Дону - Аксай.
На всех этих з-дах со 2-й пол. 1916 предполагалось выпускать 6750 легковых и 3750 грузовых автомобилей в год, но ни один з-д к этому времени ещё не был полностью построен. В СССР первые 10 полуторатонных грузовых автомобилей АМО-Ф-15 были выпущены в 1924 на з-де АМО. В 1925 началось произ-во автомобилей на Ярославском автозаводе. Развитие А. п. СССР прошло несколько этапов. В первый период (1924-30) выпускались в основном грузовые автомобили индивидуального и серийного произ-ва в небольших количествах (см. табл. 1). Производство легковых автомобилей НАМИ-1 было организовано в 1927-28 в Москве на з-де "Спартак". Второй период (1931-41) характеризуется организацией крупносерийного и массового произ-ва автомобилей, созданием специализированного автомоб. произ-ва. Индустриализация страны и коллективизация с. х-ва значительно увеличили потребность в автомоб. транспорте. В 1928-29 были приняты решения о стр-ве автозаводов в Москве и в Горьком. 1 окт. 1931 был введён в строй Моск. автозавод (АМО), ныне автозавод им. Лихачёва (ЗИЛ), реконструированный для выпуска 25 тыс. 3-тонных автомобилей в год. 1 янв. 1932 вошёл в строй Горьков-ский автозавод, рассчитанный на 100 тыс. автомобилей в год. В 1932-33 начаты работы по дальнейшему увеличению производств, мощностей автозаводов. Произ-во автомобилей быстро увеличивалось. В 1932 начат выпуск легковых автомобилей ГАЗ-А на Горьковском автозаводе (с 1936-легковые автомобили М-1). В1936 развернулось произ-во легковых 6-местных автомобилей ЗИС-101 на Моск. автозаводе. Моск. автосборочный з-д им. КИМ (1930) в 1938-39 был расширен и реконструирован для массового произ-ва малолитражных легковых автомобилей, к 1 мая 1940 были выпущены первые 3 образца, а до нач. Великой Отечеств, войны - ок. 500 автомобилей, получивших назв. КИМ-10. В 1933 Моск. автозавод выпустил 21-местный автобус ЗИС-8,в 1934 - улучшенной конструкции автобус ЗИС-12, а перед войной - автобус на 26 пассажиров ЗИС-16. Наряду с развитием произ-ва двухосных грузовых автомобилей выпускались автомобили повышенной проходимости, с 1933 - трёхосные грузовые автомобили ЗИС-6 грузоподъёмностью 2,5 т (4 т - на дорогах с твёрдым покрытием), в 1935 на Горьковском автозаводе - трёхосные грузовые автомобили ГАЗ-30 грузоподъёмностью 2 т. В эти же годы был начат выпуск автомобилей-самосвалов и шасси для специализированных автомобилей различного назначения. (См. табл. 2.) В годы Великой Отечеств, войны был. построен Уральский автозавод в Миассе (Челябинская обл.) и комплектующие его заводы - кузнечно-прессовый в Челябинске и автоагрегатный в Шадринске (Курганская обл.). В 1942-43 Уральский автозавод поставлял автомоб. двигатели и коробки перемены передач московскому и др. автозаводам, с июля 1944 выпускал 3-тонные грузовые автомобили. После войны, наряду с реконструкцией и расширением действующих з-дов, построены и начали произ-во автомобилей Минский з-д, рассчитанный на выпуск двухосных грузовых автомобилей грузоподъёмностью 6 - 7т (1947), Кутаисский - грузовых автомобилей ЗИС-150 (1951), Ульяновский - легковых автомобилей повышенной проходимости ГАЗ-69 (выпуск с 1954). На Моск. з-де малолитражных автомобилей в 1947 начат выпуск малолитражных легковых автомобилей "Москвич-400". С 1956 начат выпуск автобусов на Львовском и с 1953 на Павловском (Горьковская обл.) автобусных з-дах. В 1945 на Моск. автозаводе было организовано произ-во легкового автомобиля высшего класса ЗИЛ-110. С 1947-48 автозаводы начали освоение новых типов автомобилей взамен ранее выпускавшихся (грузовые автомобили ГАЗ-51, ГАЗ-63., ЗИС-150, ЗИС-151, Урал-355М, ЯАЗ-210, МАЗ-200, МАЗ-205 и др.; легковые - "Победа", ГАЗ-69). Расширился типаж автомобилей. Кроме бортовых автомобилей, увеличился выпуск самосвалов, автомобилей высокой проходимости, газобаллонных, санитарных, пожарных и др. специализированных автомобилей. Вновь освоенные модели автомобилей превосходили довоенные по сроку службы, мощности двигателя, комфортабельности и имели меньший удельный расход топлива. С конца 50-х гг. Д. п. получила дальнейшее развитие. Были созданы Кременчугский автозавод для произ-ва тяжёлых: самосвалов грузоподъёмностью 10-12 т и бортовых автомобилей грузоподъёмностью 12-14 т (выпуск с 1959), Белорусский автозавод - для выпуска карьерных самосвалов грузоподъёмностью 25-40 т (с 1959), построены автосборочные з-ды автомобилей-самосвалов в Саранске (Морд. АССР, 1958) и Фрунзе (Кирг. ССР, 1965), запорожский з-д "Коммунар" был реконструирован на массовый выпуск микролитражных легко-вых автомобилей "Запорожец" (с 1960). Организовано произ-во гор. автобусов ЛИАЗ-158 на 60 пассажиров в г. Ликино-Дулёво (Моск. обл., с 1959). В Кургане начато произ-во однодверных автобусов на 20 пассажиров для внутрирайонных перевозок (с 1958), в Риге - автобусов особо малой вместимости - РАФ, используемых в качестве маршрутных такси и для служебных поездок (с 1957). (См. табл. 3.) В решениях 23-го съезда КПСС (1966) предусмотрено дальнейшее развитие А. п. в СССР. Наиболее крупным автомобильным заводом, строящимся в 1966-70, станет Волжский в г. Тольятти, рассчитанный на выпуск 660 тыс. легковых малолитражных автомобилей в год. Расширяется Моск. з-д малолитражных автомобилей, организуется произ-во малолитражных автомобилей в Ижевске. Осн. з-ды перешли на выпуск новых, более совершенных моделей автомобилей: ЗИЛ-130 и ЗИЛ-131 (1967) на Моск. автозаводе, ГАЗ-53А (1965) и ГАЗ-66 (1966) на Горьковском, Урал-375 (1962) и Урал-377 (1966) на Уральском, МАЗ-500, МАЗ-503, МАЗ-504 (1965) на Минском автозаводе и др. Новые модели автомобилей обладают повышенной грузоподъёмностью, увеличенной мощностью двигателей, почти в 2 раза повышены сроки службы. Увеличивается выпуск специализированных автомобилей-цистерн, фургонов, самосвалов, седельных тягачей с полуприцепами. Значительное развитие получает производство автомобильных прицепов, агрегатов и запасных частей. Произ-во в А. п.- массово-поточное. Уровень механизации и автоматизации высок, развивается специализация. Авто-моб. з-ды получают по кооперации электрооборудование, шариковые и роликовые подшипники, изделия из резины, пластмасс, стекла, широкий ассортимент профилей, спец. узлы и агрегаты (карбюраторы, амортизаторы), краски, лаки, ткани и т. п. Созданные в годы Великой Отечеств, войны 1941-45 и после войны Уральский, Минский, Ульяновский, Кременчугский, Белорусский, Запорожский автомоб. з-ды получают с других заводов двигатели, коробки перемены передач, карданные валы, рессоры, колёса, радиаторы, отд. з-ды получают также полуфабрикаты (отливки из чёрных и цветных металлов). Специализация распространилась также на ЗИЛ и ГАЗ, к-рые раньше были комплексными предприятиями. С Моск. автозавода выведено на специализированные з-ды произ-во компрессоров для пневмотормозов, карданных валов, радиаторов, передних, средних и задних ведущих мостов и раздаточных коробок для трёхосных автомобилей. ГАЗ для вновь осваиваемых автомобилей получает двигатели со специализированного моторного з-да. Ярославский з-д в 1959 прекратил произ-во автомобилей (оно перенесено в Кременчуг) и превратился в моторный з-д. В Горьковской обл. построен з-д по произ-ву карбюраторных двигателей для легковых и грузовых автомобилей и с 1960 начал их выпускать. Созданы специализированные предприятия: в Мелитополе - з-д силовых агрегатов для микролитражных автомобилей (выпуск с 1960), в Паневежисе (Литов. ССР) - автомоб. компрессоров (с 1959), в Ярославле - топливной аппаратуры (с 1960), в Полтаве (УССР) - тормозной аппаратуры (с 1959), в Херсоне (УССР, с 1959) и в Гродно (БССР, 1959) - карданных валов, во Фрунзе (Кирг, ССР, 1959) и Лихославле (Калининская обл., 1959) - з-ды радиаторов. Построен кузнечный з-д в Токмаке (УССР, 1965), строится (1968) литейный з-д для выпуска чугунных и стальных автомоб. отливок в Саранске (Морд. АССР). Специализированные з-ды применяют высокопроиз-водит. оборудование и совершенную технологию произ-ва. В зарубежных
социалистич. странах А. п. также получает всё большее развитие (см. табл.
4).
Из капиталистич.
стран наиболее развитую А. п. имеют США (см. табл. 5).
Во всех капиталистич. странах подавляющая часть автомоб. произ-ва приходится на долю небольшого числа крупных монополий (см. Автомобильные монополии). Лит.: Селифонов В. Я., Автомобильная промышленность СССР в 1959 - 1965 гг., М., 1959; ДинерштейнМ.А., Кацура П. М., Задачи и перспективы развития автомобильной промышленности СССР в 1966 - 1970 гг., М., 1967; Полвека труда и строительства. История Ярославского ордена Ленина моторного (автомобильного) завода 1916 - 1966, Ярославль, 1966; Горьковский автомобильный. Очерк истории завода, [М., 1964]; История Московского автозавода им. И. А. Лихачева, М., 1965; Абрамович А. Д., Краткий очерк развития автомобильной промышленности и автомоб. транспорта в СССР, М., 1958; Колесников Ф. А., Автомобилестроение в капиталистич. странах, М., 1966. В. Я. Селифонов. Илл. см. на вклейке, табл. XIV. "АВТОМОБИЛЬНАЯ ПРОМЫШЛЕННОСТЬ", ежемесячный научно-технич. журнал, орган Мин-ва автомоб. пром-сти СССР. Издаётся в Москве с 1946 (с 1930 выходил под назв. "Автотракторное дело", в 1941 -1945 не издавался). Тираж (1969) 11 тыс. экз. Освещает достижения в области конструирования новых типов автомобилей, двигателей, вопросы организации и технологии автомобильного производства. АВТОМОБИЛЬНОГО ТРАНСПОРТА НАУЧНО - ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ, Государственный научно-исследовательский институт автомобильного транспорта (НИИАТ), в ведении Мин-ва автомоб. транспорта и шоссейных дорог РСФСР. Создан в 1939 в Москве под назв. Центр. НИИ автомоб. транспорта (ЦНИИАТ), в 1953-56 - Всесоюзный НИИ автомоб. транспорта (ВНИИАТ), с 1956- НИИАТ. Имеет филиал в Ленинграде. В тематике НИИАТ: вопросы повышения производительности труда на автотранспорте, организации перевозок и снижения себестоимости; улучшения эксплуатации качеств подвижного состава; орг-ции и технологии тех-нич. обслуживания и ремонта автомобилей и шин; орг-ции и обеспечения безопасности движения автомобилей; улучшения эксплуатац. качеств автомоб. топлива и смазочных материалов. Ин-т имеет аспирантуру. АВТОМОБИЛЬНО-ДОРОЖНЫЕ ИНСТИТУТЫ, готовят инженеров по проектированию, стр-ву и эксплуатации автомоб. дорог, мостов, тоннелей; по эксплуатации автомоб. транспорта и дорожных машин; по экономике и организации автомоб. транспорта. Нек-рые А.-д. и., кроме того, выпускают специалистов по стр-ву аэродромов, по автоматизации и комплексной автоматизации стр-ва, пром. и гражд. стр-ву, по гидропневмоавтоматике и гидроприводу. В СССР в 1969 имелось 4 А.-д. и.: Московский автомобильно-дорожный институт (осн. 1930), Сибирский им. В. В. Куйбышева (в Омске, осн. 1930), Харьковский (осн. 1930), Киевский (осн. 1944). Во всех А.-д. и. есть дневные и вечерние ф-ты; в Сибирском имеется заочный, в Харьковском (в г. Каменец-Подольске Хмельницкой обл.) - общетех-нич. ф-т. Срок обучения в А.-д.и.- 5- 6 лет (в зависимости от формы обучения). Защитившим дипломный проект (работу) присваивается квалификация инженера путей сообщения, инженера-механика и т. д. В А.-д. и. ведётся также подготовка науч. и науч.-пед. кадров через аспирантуру. Московский А.-д.и. имеет право приёма к защите докт. и канд. диссертаций, Киевский и Харьковский - кандидатских. АВТОМОБИЛЬНЫЕ ВОЙСКА, спец. войска, предназначенные для подвоза боеприпасов, горючего, продовольствия и др. материальных средств, необходимых для ведения боевых действий, а также для эвакуации раненых, больных и т.д..А. Состоят из автомобильных (авто-транспортных) подразделений и частей, организационно входящих в состав общевойсковых частей и соединений, а также частей и соединений родов войск или же составляют отд. автомоб. части. В некоторых армиях А. в. наз. транспортными войсками. "АВТОМОБИЛЬНЫЕ ДОРОГИ", ежемесячный производственно-технич. журнал, орган Мин-ва транспортного строительства СССР. Издаётся в Москве с 1954. Тираж (1969) 17 тыс. экз. Освещает вопросы проектирования, строительства, ремонта и содержания автомоб. дорог, а также достижения науки и техники в этой области. АВТОМОБИЛЬНЫЕ МОНОПОЛИИ капиталистических стран. Подавляющая часть произ-ва и сбыта автомобилей сконцентрирована в руках небольшого числа монополий США, ФРГ, Франции, Италии и Англии. В 1966 почти 4/5 мирового капиталистич. произ-ва автомобилей приходилось на долю 3 амер. и 7 западноевроп. автомоб. монополий, в т. ч. ок. 60% - на долю монополий США. С конца 50-х гг. в число ведущих А. м. выдвинулись также компании Японии. В каждой стране выпуск автомобилей сосредоточен на предприятиях нескольких компаний. В 1966 в США на долю "большой тройки" ["Дженерал моторе" (General Motors), "Форд мотор" (Ford Motor) и "Крайслер" (Chrysler)] приходилось св. 90% всего произ-ва автомобилей; 4 фирмы в ФРГ ["Фольксвагенверк" (Volkswagenwerk), "А. Опель" (A. Opel), "Форд-верке" (Ford-Werke) и "Даймлер-Бенц" (Daimler-Benz)], 5 компаний в Англии ["Бритиш мотор холдинге" (British Motor Holdings), "Форд мотор", "Воксхолл моторе" (Vauxhall Motors), "Руте моторе" (Rootes Motors) и "Лей-ленд мотор" (Leyland Motor)], 4 фирмы во Франции ["Рено" (Renault), "Пежо отомобиль" (Peugeot Automobiles), "Сит-роен" (Citroen) и "СИМКА отомобиль" (SIMCA Automobiles)] практически монополизировали выпуск автомобилей в своих странах. В Италии "ФИАТ" ("Фабрика итальяна аутрмобили Тори-но" - FIAT, Fabbrica Italiana Automobili Torino) контролирует 90% произ-ва автомобилей. В Японии св. 2/3 выпуска автомобилей сосредоточено на предприятиях 4 фирм: "Тоёта мотор" (Toyota Motor), "Ниссан мотор" (Nissan Motor), "Toe когё" (Toyo Kogyo) и "Мицубиси хэви индастрис" (Mitsubishi Heavy Industries). (См. табл. 1.) А. м. относятся к пром. гигантам капиталистич. мира. 7 А. м. входят в число крупнейших капиталистич. монополий, обороты по продаже к-рых превышают 1,5 млрд. долл. "Дженерал моторе" и "Форд мотор" по объёму продаж занимают 1-е и 2-е места среди пром. компаний капиталистич. мира, а по размеру активов уступают лишь крупнейшему нефт. тресту "Стандард ойл К0 (Нью-Джерси)" [Standard Oil (New Jersey)]. "Фольксвагенверк" занимает по объёму продаж 1-е место среди компаний ФРГ и 4-е - в мире. "ФИАТ" - самая крупная монополия Италии. А. м. США значительно превосходят западноевроц, и япон. компании. В 1966 число занятых на предприятиях "большой тройки" было почти в 2 раза больше, чем на заводах восьми крупнейших А. м. автомооилеи,
чем крупнейшая л. м. оаи. Европы "Фольксвагенверк". Иностр. филиалы амер.
монополий входят в число ведущих автомоб. компаний других стран. В Канаде
на долю трёх филиалов "большой тройки" США приходится 90% произ-ва автомобилей.
В Англии св. 50% автомобилестроения находится под контролем филиалов "большой
тройки" США: "Воксхолл моторе" - филиал "Дженерал моторе", "Форд
мотор" -
филиал амер. монополии "Форд мотор", "Руте моторе" контролируется "Крайсле-ром". Св. 1/3 выпуска автомобилей в ФРГ производится филиалами "Дженерал моторе" ("А. Опель") и "Форд мотор" ("Форд-верке"). Активность амер. монополий в Зап. Европе особенно возросла в связи с образованием экономич. группировок - Европ. экономич. сообщества (ЕЭС) и Европ. ассоциации свободной торговли (ЕАСТ). За период с 1958 по 1965 доля фирм, находящихся под контролем амер. монополий, в произ-ве автомобилей в странах ЕЭС увеличилась с 16% до 25%. Под влиянием конкуренции амер. А. м., а также в связи с образованием экономич. группировок в автомоб. пром-сти стран Зап. Европы и Японии усилился процесс концентрации произ-ва, возросло число слияний, поглощений, различных соглашений, предусматривающих разнообразные формы сотрудничества между компаниями. В Англии в 1966 "Бритиш мотор" поглотила независимую фирму "Джегуар каре" (Jaguar Cars), образовав "Бритиш моторе холдинг", к-рая в нач. 1968 объединилась с "Лейленд мотор" в "Бритиш Лейленд мотор корпорейшен". Имеются соглашения о специализации и кооперировании между "Бритищ Лейленд мотор корпорейшен"-(Англия) и "Инноченти" (Innocenti, Италия), "Рено" (Франция) и "Альфа Ромео" (Alfa Romeo, Италия) и др. Западногерм. фирма "НСУ моторенверке" и франц. "Ситроен" в 1965 договорились о совместном произ-ве автомобилей, для к-рых двигатели будут выпускаться в ФРГ, а кузова - во Франции. Укрепляя свои позиции на нац. рынках, А. м. Зап. Европы и Японии одновременно энергично проникают в США, форсируя экспорт туда автомобилей. Доля импортных легковых автомашин в общей продаже легковых автомобилей в США выросла с менее чем 1% в 1955 до 6% в 1965. Обострение конкурентной борьбы, рост концентрации и монополизации произ-ва способствуют усилению господства в автомоб. пром-сти мощных монополий за счёт поглощения ими или банкротства более мелких фирм. Только в течение десятилетия 1957-66 в странах Зап. Европы св. 10 компаний прекратили своё существование или были поглощены более крупными фирмами. В 1966 среди 20 крупнейших неамер. пром. монополий насчитывалось 6 автомоб. компаний против двух в 1956. За это десятилетие "Фольксвагенверк" переместилась в списке крупнейших неамер. компании с 25-го на 4-е место, япон. "Ниссан мотор" только за 1966 передвинулась с 73-го на 42-е место. А. м. США для завоевания новых рынков и вообще для усиления своих позиций за границей широко используют экспорт капитала. В 1966 по размеру новых заграничных капиталовложений (967 млн. долл.) они занимали 3-е место в стране после компаний нефтяной (2500 млн. долл.) и химич. (1063 млн. долл.) пром-сти. У "Форд мотор" и "Крайслер" соответственно V3 и 1/4 производств, мощностей по выпуску автомобилей расположены за границей. "Дженерал моторе" имеет за пределами США предприятия в 24 странах. Осн. средством внешнеэкономич. экспансии А. м. западноевроп. стран служит экспорт автомобилей. Самый крупный экспортёр автомобилей в мире "Фольксвагенверк" вывозит св. 60% производимых им автомашин, итал. А. м. "ФИАТ" - почти 30%. Япон. фирмы быстрыми темпами расширяют экспорт грузовых автомобилей, их доля в мировом экспорте выросла почти с нулевого у-ровня в 1957 до 18% в 1965. "Тоёта мотор" с 1962 по 1966 в 3 раза увеличила свой экспорт при росте произ-ва в 2 раза. Ведущие А. м. представляют собой мощные машиностроит. концерны, в производственной программе к-рых видное место занимает также продукция др. отраслей машиностроения. А. м. играют важную роль в произ-ве с.-х. машин, энергосилового и авиационного оборудования, воен. и ракетно-космич. техники. В годы 2-й мировой войны "Дженерал моторе" и "Форд мотор" по сумме правительственных воен. заказов (13,8 млрд. долл. и 5,3 млрд. долл.) занимали 1-еи 3-е места, доля воен. продукции в их проиЗ-ве составляла почти 90% . Несмотря на то, что с появлением новых видов вооружения роль А. м. в произ-ве воен. техники снизилась, стоимость воен. продукции, ежегодно выпускаемой такими компаниями, как "Дженерал моторе" и "Форд мотор", в сер. 60-х гг. достигала 0,5 млрд. долл. Западногерм. А. м. производят более 50 типов воен. машин, а также выступают осн. поставщиками танков для бундесвера. А. м. являются ведущими экспортёрами продукции воен. назначения: среди поставщиков вооружения за пределы США чКрайслер" занимает 5-е место по сумме заграничных воен. заказов (1966 - 154,2 млн. долл.). Амер. А. м. осуществляют крупные поставки автомобилей для армий стран, входящих в агрессивные блоки, возглавляемые США. В 1965 доля этой продукции в амер. экспорте автомобилей достигала 10%. А. м. выступают ген. подрядчиками и субподрядчиками при осуществлении крупных проектов в области произ-ва ракетно-космич. техники и космич. исследований. В автомоб. пром-сти сильны гос.-моно-полистич. тенденции. За счёт гос. средств финансируются н.-и. работы А. м. в области воен. и ракетно-космич. техники. В ряде стран гос-во непосредственно участвует в автомоб. пром-сти, являясь собственником или крупнейшим акционером автомоб. компаний ("Рено" во Франции, "Альфа Ромео" в Италии, "Фолькс-вагенверк" в ФРГ). В западноевроп. странах гос-во активно способствует реорганизации нац. компаний, стимулируя их к объединению и сотрудничеству. В годы 2-й мировой войны А. м. США и Англии существенно увеличили свои производств, мощности за счёт гос. строительства (напр., "Крайслер" - почти в 4 раза). Крупнейшие
А. м. (см. табл. 2). Продажи самой крупной А. м. "Дженерал моторе", контролируемой
Дюпонами, составили в 1966 св. 6,7 млн. автомобилей, из к-рых 1,5 млн.
было произведено за границей. Она имеет только в США ок. 130 з-дов и расходует
на капиталовложения ежегодно до 1,5-2 млрд. долл.; входит также в число
крупнейших производителей в США локомотивов, холодильного оборудования,
авиац. двигателей, систем управления, деталей и узлов для ракет.
Ею, в частности, осуществлялась разработка подъёмно-трансп. оборудования
для системы оружия "Минитмен". Общий объём продаж в 20 млрд. долл., чистая
прибыль в 1,8 млрд. долл. и число занятых 750 тыс. чел. делают "Дженерал
моторе" крупнейшей пром. монополией капиталистич. мира. Вторая в мире А.
м. "Форд мотор" продала в 1966 4,5 млн. автомобилей, из них почти 1,2 млн.
выпущены её заграничными з-дами. На её долю приходится также 15% амер.
произ-ва тракторов. Она имеет дочернюю компанию, занимающуюся проектированием
и выпуском управляемых снарядов, электронных систем и счётно-решающих устройств
воен. назначения и т. д.
Находящаяся в сфере влияния Морганов А. м. "Крайслер" особенно энергично развивает свою деятельность в Зап. Европе, скупая ведущие европ. автомоб. компании. Так, в 1965 она увеличила свою долю во франц. автомоб. компании "СИМКА" до 77% акц. капитала (23% акций компании "СИМКА" принадлежит А. м. "ФИАТ"). Из 2,1 млн. автомобилей, реализованных ею в 1966, почти 0,6 млн. выпущено за границей."Крайслер" играет важную роль в произ-ве танков и управляемых снарядов, являлся ген. подрядчиком по стр-ву первой ступени ракеты-носителя "Сатурн 1 Б". На долю "Фольксвагеиверк", 40% акц. капитала к-рой принадлежит федеральному пр-ву и пр-ву земли Нижняя Саксония, приходится св. 50% выпуска и св. 60% экспорта автомобилей ФРГ. Из 978 тыс. автомобилей, вывезенных ею в 1966, более 55% было экспортировано в США, где монополия прочно удерживает 1-е место среди иностр. поставщиков автомобилей. Это обусловлено выпуском более доступных широкому потребителю малолитражных автомобилей известной марки "Фольксваген-1200". Англ. А. м. "Бритиш Лейленд мотор корпорейшен", возникшая в нач. 1968 в результате серии слияний и поглощений, имевших место в 60-х гг. среди нац. англ, автомоб. компаний, является одним из крупнейших производителей автомобилей в капиталистич. мире. По объёму выпуска продукции она занимает 1-е место в Англии и 7-е место в мире. Её предприятия выпускают разнообразные типы автомобилей, более 35% из них экспортируется. На долю легковых автомобилей приходится почти 3/4 оборота итал. А. м. "ФИАТ", к-рая входит в сферу влияния семьи Аньелли-Нази, крупнейших представителей финанс. олигархии Италии. Монополия производит также тракторы, самолёты, ж.-д. подвижной состав, судовые двигатели, холодильники, станки, сталь и т. д. Соглашение 1966 о сотрудничестве между франц. гос. компанией "Рено" и частной фирмой "Пежо" положило начало созданию во Франции мощного автомоб. объединения, под контролем к-poro будет находиться св. 60% произ-ва и 65% экспорта автомобилей Франции. На долю "Ситроен" в результате присоединения ею в 1967 фирмы "Отомобиль М. Берлье" (Automobiles M. Berliet) приходится половина франц. произ-ва грузовых автомобилей грузоподъёмностью более 6 т. "Ситроен" занимает 2-е место во Франции также по произ-ву легковых автомобилей (после "Рено"). Самая крупная А. м. Японии "Тоёта мотор" по темпам роста значительно обгоняет своих конкурентов; в 1967 она выпустила более 800 тыс. автомашин. И. М. Резникова. АВТОМОБИЛЬНЫЙ
ДВИГАТЕЛЬ. Для автомобилей могут быть применены тепловые (внутр. сгорания
и паровые) и электрич. двигатели. Подавляющее большинство А. д.
являются поршневыми двигателями внутр. сгорания (ПДВС). По рабочему
процессу автомоб. ПДВС делятся на четырёх- и двухтактные, а по способу
воспламенения горючего - на двигатели с искровым воспламенением (наз. также
карбюраторными или бензиновыми) и с самовоспламенением в воздухе
высокой темп-ры, сжимаемом в цилиндрах двигателя (дизели). В цилиндры
карбюраторных ПДВС поступает горючая смесь, состоящая из паров бензина
и воздуха, приготовляемая в карбюраторе. Существуют также ПДВС,
к-рые не имеют карбюратора и снабжены устройством для непосредственного
впрыскивания топлива во впускной трубопровод или в цилиндр двигателя.
По
характеру протекания рабочего цикла эти двигатели не отличаются от карбюраторных.
У дизелей топливо с воздухом смешивается внутри цилиндров,
в к-рые
дизельное топливо впрыскивается в распылённом виде через форсунки насосом
высокого давления. А. д. различаются по числу и расположению цилиндров
(рядные, V-образные и др.), расположению клапанов (верхнее и нижнее),
рабочему объёму (литражу) цилиндров, типу охлаждения (жидкостное
и воздушное), по назначению и т. п. Для совр. легковых, а также
малых и ср. грузовых автомобилей применяются преим. четырёхтактные верхнеклапанные
карбюраторные ПДВС с жидкостным охлаждением. Дизели, работающие на более
дешёвом, чем бензин, топливе и превосходящие карбюраторные двигатели по
топливной экономичности и долговечности (но уступающие им по простоте конструкции
и первонач. стоимости, литровой мощности, пусковым качествам, бездымности
работы), используются преим. для тяжёлых грузовых автомобилей и многоместных
автобусов. Однако по таким важным параметрам, как уд. масса (кг/квт иликг/л,
с.), компактность, бесшумность, совр. быстроходные дизели вплотную приблизились
к карбюраторным двигателям. В связи с этим благодаря повышению литровой
мощности, дизели в последнем десятилетии стали применяться также на лёгких
грузовых автомобилях и даже на легковых автомобилях.
Рис. 1. Поперечный
разрез карбюраторного двигателя МЗМА-412: 1 - картер; 2 - коленчатый вал;
3 - шатун; 4 - поршневой палец; 5 - поршень; 6 - блок цилиндра; 7 - клапан;
8 - головка цилиндров; 9 - распределительный вал; 10 - коромысло; 11 -
карбюратор; 12 - стартёр.
Совр. четырёхтактные ПДВС (рис. 1,2) состоят из блока цилиндров, выполняемого обычно вместе с картером, головки цилиндров, поршней с уплотнит, и масло-сбрасывающими кольцами, шатунов, коленчатого вала, маховика, распределит, (кулачкового) вала, впускных и выпускных клапанов с пружинами, деталей привода клапанов (коромысла, толкатели), передачи, связывающей коленчатый вал с распределит, валом, запальных свечей или топливных форсунок и др. Они оборудуются радиатором и вентилятором системы охлаждения, насосами для принудит, циркуляции смазочного масла и охлаждающей жидкости и для подачи топлива из бака, а также топливными, масляными и воздушными фильтрами, пусковым стартёром, трубопроводами для воздуха, газа, топлива, масла и охлаждающей жидкости, автоматами, управляющими частотой вращения коленчатого вала и темп-рой охлаждающей жидкости и горючей смеси. Мощность совр. (1968) карбюраторных ПДВС легковых автомобилей 15-310 кет (20-425 л. с.), рабочий объём цилиндров от 0,35 до 7,6 л, степень сжатия 7-11, макс, частота вращения коленчатого вала 4000-6000 об/мин, литровая мощность 22-50 квт/л (30-70 л. с./л), уд. масса 1,1-4 кг/квт (0,8-3 кг/л, с.) и миним. удельный расход топлива до 270 г/(квт*ч) [200 г/(л. с. *ч)]; срок службы до первого капит. ремонта соответствует пробегу автомобиля в 75-150 тыс. км и более; у ПДВС спортивных и гоночных автомобилей частота вращения коленчатого вала достигает 10000-12000 об/мин, литровая мощность иногда превышает 150 квт/л (200 л.с./л); у карбюраторных ПДВС, применяемых для грузовых автомобилей, мощность не превышает 220 кет (300 л.с.), рабочий объём цилиндров составляет 1,5-9,5 л, степень сжатия 6,5-8,5, макс, частота вращения коленчатого вала 2500-4000 об/мин. Дизельные ПДВС имеют мощность 30-620 квт (40- 850 л. с.), рабочий объём цилиндров 1,5- 40 л, степень сжатия 15-24, макс, частоту вращения коленчатого вала 2000-5000 об/мин, литровую мощность 11-23 кет/л (15-35 л.с./л), уд. массу 3,4-6,8 кг/квт (2,5-5 кг/л, с.), миним. удельный расход топлива 205- 210 г/(квт-ч) [150-155 г/(л.с.-ч)]; срок службы до первого капит. ремонта соответствует пробегу автомобиля в 150- 300 тыс. км.
Рис. 2. Поперечный разрез четырёхтактного дизеля ЯМЗ-236: позиции 1 - 10 и 12 - такие же, как на рис. 1; 11 - воздухоочиститель; 13 - толкатель; 14 - штанга; 15 - форсунка; 16 - насос высокого давления. Дальнейшее развитие А. д. предусматривает рост мощности, долговечности, уменьшение габаритов и сокращение содержания вредных компонентов в составе отработавших газов. Увеличение мощности в осн. достигается повышением частоты вращения коленчатого вала у карбюраторных двигателей и применением наддува у дизелей. Кроме того, у бензиновых двигателей увеличивается степень сжатия и частично возможна замена карбюратора системой принудит, впрыскивания топлива. Перспективна замена обычных ПДВС на нек-рых легковых автомобилях и лёгких грузовых автомобилях более лёгкими и компактными роторно-порщневыми двигателями (см. Роторный двигатель). В случае решения проблемы топливной экономичности газотурбинных двигателей без существенного усложнения их конструкции они могут получить широкое распространение при мощностях 750 кет (1000 л.с.) и более. Создание лёгких и компактных аккумуляторов позволитзаменить ПДВС на автомобилях, работающих в городах, электродвигателями (см. также Двигатель внутреннего сгораниям. Автомобиль). Осн. показатели совр. отечественных ав-томоб. ПДВС приведены в табл. (стр. 157). Лит.: Автомобильные бензиновые V-об-разные двигатели, М., 1958; Справочник инженера автомобильной промышленности, пер. с англ., т. 1, М., 1962; Анохин В. И., Отечественные автомобили, 2 изд., М., 1964; Конструкция и расчёт автотракторных двигателей, 2 изд., М., 1964; Xанин Н. С., Чистозвонов С. Б., Автомобильные роторнопорш-невые двигатели, М., 1964. С.Б. Чистозвонов.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
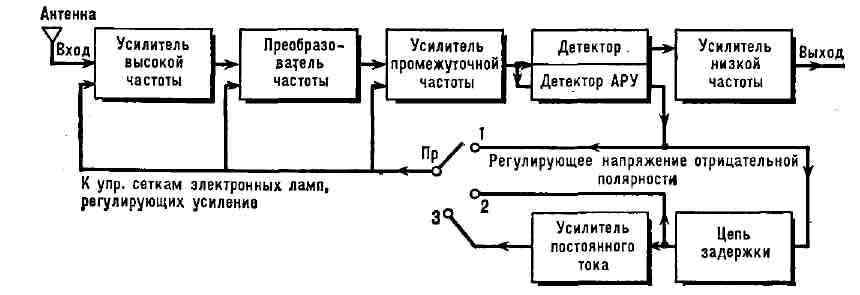
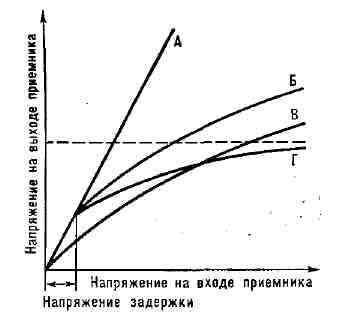
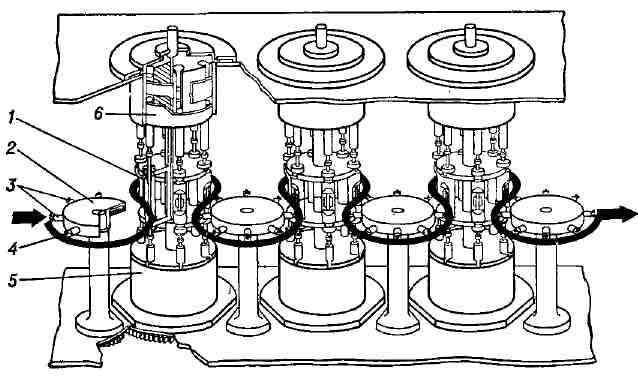
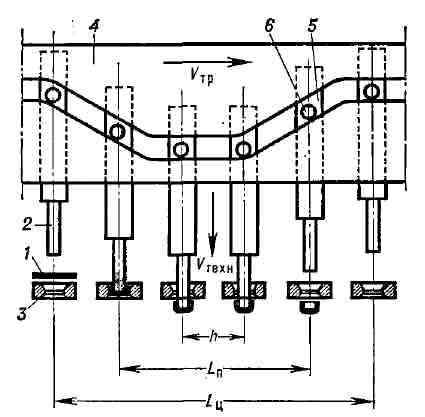
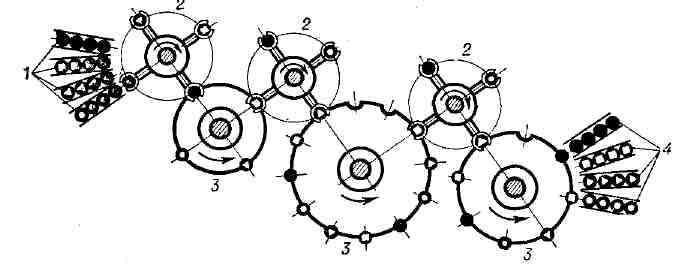
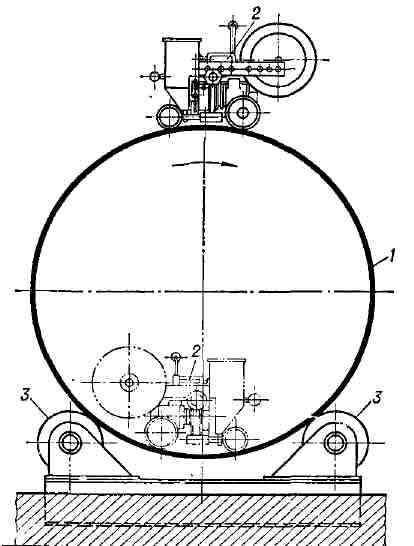
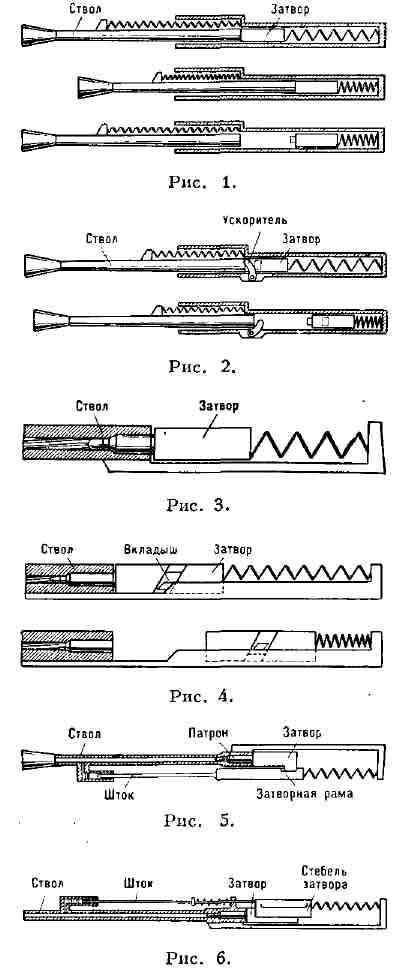
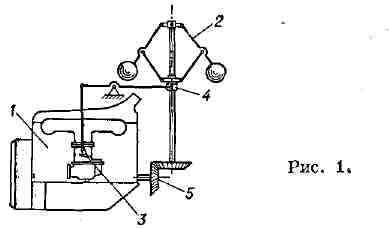
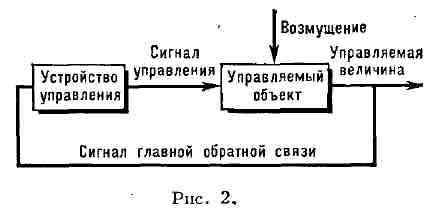
 =
= 420-750 Мн/м2 (42-75 кгс/мм2),
относительное удлинение
=
= 420-750 Мн/м2 (42-75 кгс/мм2),
относительное удлинение = 14-22% ,для холоднотянутых
= 14-22% ,для холоднотянутых  нагартованных прутков
нагартованных прутков  . Механич. свойства
А. с. в поперечном волокну направлении существенно понижены. Пластичность
и вязкость А. с., благодаря присутствию серы и фосфора, ниже, чем у обычных
углеродистых сталей. Свариваемость плохая. Детали из А. с. обычно применяются
без термич. обработки или только с отпуском для снятия напряжений. А. с.
используются гл. обр. для изготовления болтов, гаек, нек-рых деталей автомобилей,
приборов и пр.
. Механич. свойства
А. с. в поперечном волокну направлении существенно понижены. Пластичность
и вязкость А. с., благодаря присутствию серы и фосфора, ниже, чем у обычных
углеродистых сталей. Свариваемость плохая. Детали из А. с. обычно применяются
без термич. обработки или только с отпуском для снятия напряжений. А. с.
используются гл. обр. для изготовления болтов, гаек, нек-рых деталей автомобилей,
приборов и пр.